Résumés
Résumé
Cet article a pour objectif de présenter la gestion de la sécurité dans l’activité réalisée par des arboristes-élagueurs. Au travers de l’observation des chantiers d’élagage et d’entretiens d’auto et allo-confrontation, les résultats mettent d’une part en lumière les conflits d’objectifs entre la dimension productive (efficience et efficacité) et la dimension sécuritaire de l’activité. D’autre part, il est montré que réaliser une taille harmonieuse (efficacité) demande des savoir-faire en arboriculture, mais également la maîtrise des déplacements dans l’arbre. Cette maîtrise est intimement liée aux dimensions de gestion de risques et d’efficience visant à réduire notamment les douleurs et la fatigue. À partir de ces résultats, nous démontrons que la gestion de la sécurité apparaît dans ce métier comme une sécurité en action structurante du travail dans les arbres, permettant à la fois l’efficience dans l’usage des équipements et des outils de travail - dont son propre corps - et l’efficacité des soins prodigués aux arbres.
Mots-clés :
- gestion de la sécurité,
- efficacité,
- efficience,
- arboristes-élagueurs
Abstract
This paper explores how arborists incorporate safety management in their work activity. Data-gathering was based on both the observation of pruning sites and the auto- and allo-confrontation method in which four arborists commented 3 videos of pruning situations that they or their colleagues had directed. The results show the conflict that arises between efficient production and risk prevention strategies. Harmonious cutting requires tree cultivation know-how, but also the proper control of one’s movements in the tree when hanging from ropes. This control is intimately linked to the management of both risk and efficiency, particularly with regard to reducing pain and fatigue. Based on these results, we demonstrate that safety management is an integral dimension of tree work, permitting both the effective use of equipment and tools – including one’s own body – and efficient care for trees.
Keywords:
- safety management,
- effectiveness,
- efficiency,
- arborists
Resumen
Este artículo tiene como objetivo presentar la gestión de la seguridad en la actividad llevada a cabo por los podadores de árboles. A través de la observación de sitios de poda y entrevistas de auto-conforntación y allo-confrontación, los resultados destacan, por un lado, el conflicto de objetivos entre la dimensión productiva (eficiencia y efectividad) y la dimensión de seguridad en la actividad. Por otro lado, se demuestra que una poda armoniosa (eficiencia) requiere un saber-hacer en arboricultura, pero también el dominio de movimientos en el árbol. Este dominio está íntimamente ligado a las dimensiones de gestión de riesgos y eficiencia dirigidas a reducir el dolor y la fatiga. En base a estos resultados, mostramos que la gestión de la seguridad operacional aparece en este oficio como seguridad en acción estructurante del trabajo en los árboles, permitiendo al mismo tiempo la eficiencia en el uso de los equipos y herramientas de trabajo, incluyendo su propio cuerpo, y la eficacia del cuidado brindado a los árboles.
Palabras clave:
- gestión de la seguridad,
- eficacia,
- eficiencia,
- podadores de arboristas
Corps de l’article
1. Introduction
Le patrimoine arboré d’une ville recèle de fonctions essentielles à l’équilibre urbain. D’une part, par leurs vertus écologiques et sanitaires, les arbres régulent la température de l’air, purifient l’air, diminuent les risques d’inondations et garantissent la biodiversité (Nowaket coll., 2006 ; Young, 2010). D’autre part, par leur rôle social (qualité du paysage, ombrage sur les places et les voies piétonnes, cycle des saisons et visions bucoliques en ville, etc.), les espaces verts favorisent une meilleure qualité de vie en ville (Lee et Maheswaran, 2011). La présence d’arbres publics comporte également un intérêt économique puisqu’elle peut contribuer à accroître la valeur monétaire des biens immobiliers situés à proximité. Cependant, l’arbre urbain est considéré comme un élément fragile, car même en bon état, certains peuvent présenter des risques de chutes, d’arrachement, de dépérissement dus aux conditions climatiques, aux parasites, aux maladies émergentes, ainsi qu’aux actions menées dans les environnements proches (travaux, par exemple). De ce fait, l’entretien des arbres urbains constitue un enjeu majeur des collectivités afin d’éviter les accidents et les conséquences pour les personnes et/ou les biens, et permettre un renouvellement durable de leur patrimoine naturel et culturel (savoir supprimer des arbres pour en planter de nouveaux, préserver les arbres remarquables, adopter une taille respectueuse et assurer un bon suivi sanitaire) (Ville de Rouen, 2015).
Les arboristes-élagueurs sont les professionnels responsables de l’entretien des arbres. Ils agissent
« en intégrant les connaissances en arboriculture, les mesures de prévention et de protection des arbres, ainsi que les règles de sécurité. Les soins aux arbres requièrent de véritables qualifications, avec un accent tout particulier sur les conditions de sécurité dans le travail. » (European Arboricultural Council, 2015).
En effet, au-delà des connaissances sur l’objet de l’action (les arbres en l’occurrence), les arboristes-élagueurs – aussi appelés grimpeurs – possèdent des compétences pour la gestion de la sécurité du chantier en milieu urbain, non seulement pour eux-mêmes, mais également pour les riverains. Il s’agit ainsi d’un métier réalisé dans un environnement dynamique à risque pour soi et pour les autres (risque de chutes, glissades, blessures) avec des fortes sollicitations physiques (maintien d’engins lourds, gestes de découpage, postures soutenues par des cordes), cognitives (supervision du process, interactions avec l’homme de pied, prises de décision) et organisationnelles (partage des tâches, choix des arbres, séquencement des actions, gestion temporelle).
Comme le soulignent Bortolini et coll. (2016), la littérature scientifique référente à la gestion de risques et aux taux d’accidents/maladies professionnelles chez les arboristes-élagueurs est assez pauvre, tant qualitativement que quantitativement. Les données dans le domaine concernent plutôt les agriculteurs ou les travailleurs forestiers (Bailer et coll., 1997 ; Colantoni et coll., 2012 ; Lilley et coll., 2002 ; Lindroos et Burström, 2010 ; Lundqvist et Gustafsson, 1992). Dans leur recherche quantitative réalisée en Italie, Bortolini et coll. (2016) indiquent que les accidents les plus fréquents chez les arboristes-élagueurs sont les coupures, les contusions et les lésions oculaires, sans que celles-ci aient porté des grandes conséquences pour les travailleurs. Néanmoins, des forts taux d’incapacité ont été observés majoritairement dans les cas de traumatismes, de fractures et de hernies discales. Les auteurs suggèrent des analyses qualitatives concernant le travail de ces professionnels afin de complémenter des approches épidémiologiques. La recherche en phénoménologie de Bardekjian (2015) sur les arboristes-élagueurs indépendants travaillant sur une forêt urbaine en Ontario fournit des résultats utiles sur comment ces travailleurs perçoivent et négocient leurs conditions de travail face au marché, aux pressions politiques et à la réglementation. Elle fait partie du peu de recherches que nous avons trouvé dans une orientation qualitative (Bardekjian, 2015 ; Dozier et Machtmes, 2005 ; Gathright et coll., 2006 ; Koeser et coll., 2015). Aucune d’entre elles n’est ancrée, à notre connaissance, dans le champ de l’ergonomie de l’activité.
Dans ce contexte, l’objectif de cet article est de présenter l’analyse de l’activité des arboristes-élagueurs en ce qui concerne la gestion de la sécurité pour soi et pour les autres. Seront présentés dans ce texte les conflits d’objectifs entre la dimension sécuritaire et la dimension productive de l’activité, ainsi que les arbitrages qui en découlent. Les résultats montrent que la gestion de la sécurité apparaît dans ce métier comme une sécurité en action structurante du travail dans les arbres, permettant à la fois l’efficience dans l’usage des équipements et des outils de travail - dont son propre corps - et l’efficacité des soins prodigués aux arbres.
2. La sécurité en action
Les travaux en ergonomie ont depuis longtemps montré que, pour agir en sécurité tout en préservant leur santé, les travailleurs doivent réaliser des compromis divers entre le respect des règles de sécurité, les objectifs de la tâche, les moyens et contraintes disponibles, leurs ressources internes, etc. (Guérin et. coll., 1991 ; Amalberti, 2001). La vision de la sécurité ici portée est celle d’une construction et non d’un état impossible à atteindre (zéro accident).
Par ailleurs, la littérature en sciences humaines et sociales – ergonomie, sociologie, psychologie, etc. – a mis en évidence la complexité de cette question, qui ne peut pas être réduite à une articulation simple et statique, voire à une addition, entre la production de règles formelles d’un côté et l’usage qui en est (ou pas) fait d’un autre côté (Bourrier, 2011 ; Dien, 1998 ; Amalberti, 2007 ; Daniellou, 2012). Il est utile de tenir compte du caractère adaptatif, dynamique et situé de la sécurité, afin de continuer d’avancer dans ce champ.
Le concept de « sécurité en action » que nous adoptons ici va dans ce sens. Il est présenté moins comme une dichotomie que comme une combinaison entre règles et gestion des situations. C’est
« la manière dont les sujets s’y prennent pour agir en sécurité face à des perturbations et pour gérer leurs propres actions qui ne sont pas toujours optimales au regard des règles » (De Terssac et Gaillard, 2009).
Les auteurs défendent l’idée que la sécurité en action est arbitrée par les professionnels eux-mêmes selon la situation, en complément des règles formelles ou en contradiction avec elles. Dans ce sens, les opérateurs combinent les règles dans l’action, en décidant de les utiliser ou non, et surtout en en inventant d’autres pour agir en sécurité. Autrement dit, la sécurité résulte de la capacité des opérateurs à juger quand et comment adapter (ou ne pas adapter) les procédures aux circonstances locales (Dekker, 2003). C’est la manifestation de la sécurité ici et maintenant. Dans ce sens « règles de sécurité » et « règles d’action » ne peuvent être conçues de façon dissociée : la gestion de la sécurité doit être appréhendée
« comme une action attachée à l’action professionnelle qui se confond avec elle et non comme une action détachée, séparée et différente » (de Terssac et Gaillard, 2009).
Nascimento et coll. (2013) ont distingué deux cas de figure où la sécurité en action s’exprime. Dans le premier, les règles formelles sont absentes, génériques ou ne couvrent pas tous les cas. La sécurité en action comprend alors l’invention de règles, en s’appuyant éventuellement sur les règles existantes. Dans le deuxième cas, les règles de sécurité existent, mais leur application est remise en cause lorsque le contexte initialement prévu fait défaut ou lorsqu’elles sont considérées comme contre-productives. Les auteurs donnent des exemples issus de recherches empiriques pour chaque cas.
Dire qu’une règle de sécurité est contre-productive signifie qu’elle répond certes aux objectifs de sécurité, mais qu’elle empêche l’atteinte d’autres dimensions de l’activité, se manifestant par des conflits d’objectifs qui trouvent leur issue soit dans des arbitrages (laisser tomber un des objectifs), soit dans des compromis (essayer de tenir tous les bouts, mais avec un coût important). La dimension productive de l’activité est comprise ici comme un processus et non comme un résultat. Suivant Bourgeois et Hubaut (2005), ce processus comprend autant
« l’efficacité (degré de réalisation d’un objectif : mesure d’un résultat), mais aussi l’efficience (degré d’engagement d’une ressource dans ce résultat : mesure de l’intensité des efforts consentis pour l’obtenir). »
3. Le métier d’arboriste-élagueur : des actions dans et sur les arbres dans un environnement à risque
3.1 Qualification, réglementation, interventions
Pour exercer ce métier, les professionnels doivent être titulaires du Certificat de Spécialisation (CS) « Taille et soins aux arbres », obtenu après une année de formation théorique et pratique ou à la suite d’une demande de validation des acquis de l’expérience (VAE). Des qualifications annexes sont nécessaires au déploiement du métier sur un chantier : le CACES (Certificat d’Aptitude à la Conduite En Sécurité) autorisant la conduite d’engins mobiles automoteurs de chantiers et d’équipements de levage (CACES grue et CACES nacelle), les permis de conduire C et EC (lourd et super lourd) et le brevet de Sauveteur Secouriste du Travail.
Les actions menées dans et sur les arbres par les arboristes-élagueurs sont diverses et dépendent de la saison. Elles sont soumises à une double réglementation en France : l’une relevant du Code du travail concernant les travaux temporaires en hauteur et le travail au moyen de cordes (articles R. 233-13-20 à R-233-13-37 ; arrêté du 4 août 2005 modifié) et l’autre concernant la protection de l’environnement relevant des codes forestiers, de l’urbanisme, du patrimoine et de la voirie routière ainsi que du code général des collectivités territoriales (pour ce qui concerne le droit public).
Deux grands types d’interventions sont réalisées par les arboristes-élagueurs :
-
L’abattage/démontage, qui s’avère nécessaire lorsqu’un arbre est malade, mais aussi en cas de gêne du trafic routier, par exemple. L’abattage n’existe pas en tant que tel dans un milieu urbain. Il se réalise par étapes, ce que l’on appelle le démontage. Il se réalise tout au long de l’année, de façon privilégiée la nuit afin de réduire les contraintes logistiques du chantier. L’évacuation des troncs, débitage et fendage du bois sont réalisés après le démontage lorsque les morceaux de bois sont évacués, stockés et fendus pour devenir bois de chauffage. Le dessouchage consiste à extraire les racines et la souche de l’arbre démonté avant d’aplanir le terrain ainsi libéré.
-
La taille ou l’élagage a pour but, en préservant l’architecture naturelle de l’arbre, de l’adapter aux contraintes de son environnement. Il s’agit d’une activité saisonnière qui se réalise entre l’automne et l’hiver. La prescription de la taille est variable, elle va de ce qui est appelé une taille douce, proche de l’éclaircie, à un retour à l’ancienne coupe, qui consiste à couper toutes les jeunes branches. La prescription dépend à la fois de la santé de l’arbre, mais aussi de la réglementation liée aux différentes contraintes urbaines. Notre recherche porte sur l’activité des arboristes-élagueurs lors de ce type d’intervention.
Dans les deux cas, au préalable de l’installation du chantier, un arrêté municipal est pris et la zone concernée est progressivement mise en sécurité. Les arrêtés municipaux sont gérés et installés par le chef d’équipe qui fait des repérages de faisabilité du chantier quelques jours avant l’arrivée de l’équipe sur place. Le chantier va être fortement conditionné par la météorologie. Toute intervention doit être suspendue lorsque les conditions climatiques sont défavorables (pratiquement et sauf circonstances exceptionnelles, lorsque les services de la météorologie nationale émettent un avis d’alerte orange).
3.2 Équipements et techniques d’élagage
Les techniques de travail dans les arbres sont récentes puisqu’elles ne datent que d’une trentaine d’années, mais elles se transforment rapidement, comme les équipements utilisés. Ces derniers peuvent être classés en trois catégories :
-
Ceux qui servent aux déplacements dans l’arbre et au travail en hauteur : un harnais, deux cordes de rappel, deux longes de maintien au travail (armées ou non), un nœud autobloquant, des mousquetons et poulies, des porte-outils, des griffes, un sac de rangement, échelles et nacelles.
-
Ceux qui se rattachent à la protection individuelle : un casque, des lunettes, des protections auditives, des gants (de choix varié selon le type d’activité et de conditions climatiques), des chaussures de sécurité adaptées à la grimpe, un pantalon anti-coupures, des manchons pour les avant-bras anti-coupures.
-
Ceux liés à l’action d’élagage : une tronçonneuse thermique spécifique à l’élagage (petite et de manipulation prévue à une seule main, appelée aussi élagueuse) et une scie manuelle à élaguer avec sa gaine.
Quelles que soient l’architecture de l’arbre et la prescription de taille, l’activité d’élagage en hauteur se déroule selon trois phases chronologiques précises : l’accès à l’arbre, la recherche du point culminant et la coupe.
L’accès à l’arbre peut se faire par échelle, nacelle ou corde. Considérée peu coûteuse d’un point de vue physique, l’utilisation de l’échelle présente cependant des risques pour la sécurité car sa stabilité au sol reste incertaine lorsque les appuis sont mouvants. Quant à l’appui du haut de l’échelle, qui se fait soit sur le fût (centre de l’arbre), soit sur une branche principale, il peut être amené à glisser en cas de pluie ou de vent. Ainsi, l’utilisation d’une échelle nécessite une personne présente en permanence au bas de l’échelle pour surveiller son appui et son maintien. Les procédures de sécurité imposent au grimpeur qui choisit ce mode d’accès de passer d’abord une corde de rappel à une fourche pour être attaché à l’arbre en cas de chute. Le travail d’élagage depuis une échelle est interdit. L’accès à l’arbre via la nacelle élévatrice, qui se présente comme un engin sûr et pratique pour l’élagage en hauteur, est le moyen d’accès le plus encouragé depuis une circulaire ministérielle datant de 2008. La nacelle présente des avantages : la plate-forme de travail est suffisamment spacieuse et sécurisante pour pouvoir travailler avec des machines à chaîne tournante, le maintien est sécuritaire, car elle est entourée d’un garde-corps qui peut dispenser d’utiliser un harnais ; en plus, son appui est stable. L’inconvénient est qu’elle limite l’accès à l’arbre à sa périphérie, ce qui oblige le travailleur lors de ses premiers déplacements sur les branches à se rapprocher du centre (fût) de l’arbre. Les techniques d’accès aux arbres par les moyens cordés sont de deux types :
-
Grimper en traditionnel : grimper de branche en branche en alternant la corde de travail (rappel) et la longe et en s’aidant des pieds et des mains.
-
Grimper à la corde, qui comprend 1) le grimper au « footlock », où la corde d’ascension est lancée du sol à l’aide du lancer de petit sac. Le grimpeur bloque la corde avec le pied et monte soit avec une poignée ascensionnelle soit avec un nœud autobloquant ; 2) grimper au prussik ou grimper à l’anglaise, où le grimpeur est en suspension dans son rappel, les pieds en appui sur le tronc. Ce moyen est utilisé en dernier recours, car il est considéré risqué et coûteux physiquement. Cependant, il permet un accès direct au centre de l’arbre, rendant plus efficace l’accès pour la coupe postérieure.
Une fois dans l’arbre, le grimpeur va chercher la fourche culminante de ce dernier afin d’y passer sa corde de rappel qui sera ainsi sa corde principale pour son maintien lors de ses déplacements dans l’arbre. C’est le point d’ancrage principal. Lorsque le point d’ancrage principal est passé, vont s’alterner ensuite des phases de déplacement et de taille dans l’arbre. Le grimpeur va se déplacer le long des branches, se placer et fixer éventuellement un second point d’ancrage local, avant de tailler la zone atteinte. Sa corde principale lui permet de remonter le long de l’arbre après avoir terminé une zone afin de s’engager vers une nouvelle zone à tailler.
4. Terrain de recherche, population et méthodes
4.1 Terrain de recherche
La recherche a été réalisée dans le service de gestion de l’arbre de la Ville de Rouen, France, dans la période d’octobre 2013 à avril 2014. Ce service est rattaché à la Direction des Espaces Publics et Naturels (DEPN).
L’équipe se compose comme suit, par hiérarchie décroissante :
-
un technicien territorial chef, dont la mission est d’assurer la gestion du patrimoine arboré de la ville ;
-
un agent de maîtrise principal, responsable de l’équipe travaux régie ;
-
un adjoint technique principal, chauffeur poids lourd ;
-
l’équipe travaux régie, composée de cinq adjoints techniques territoriaux arboristes- élagueurs et d’hommes de pied. Ces derniers viennent en renfort lors de la campagne hivernale et n’ont pas forcément de qualification en élagage. Les hommes de pied ont pour mission de gérer la zone de sécurité déployée au sol et de traiter les branches coupées jonchées au sol. Ils sont aussi amenés à seconder les arboristes-élagueurs, en particulier dans la mise en place des échelles, moyen d’accès à l’arbre, ou lors du remplissage en carburant des tronçonneuses.
L’équipe possède 2 camions-nacelles (10 et 16 mètres) et 2 camionnettes servant à déplacer les hommes et les outils des locaux aux chantiers en cours. Chaque agent possède sa propre élagueuse et une scie. Le matériel, qu’il soit collectif ou individuel, est entretenu de façon hebdomadaire.
Le terrain a ouvert ses portes pour qu’une recherche soit réalisée sans pour autant formuler une demande initiale. Après la restitution d’une première étude de diagnostic de la communication verbale et non verbale entre l’arboriste-élageur dans l’arbre et l’homme de pied, une demande a émergé de la part du chef du service. Elle consistait à comprendre comment la sécurité est assurée par des agents expérimentés dans un métier dangereux et pourtant peu touché par les accidents du travail et les maladies professionnelles. En effet, les accidents du travail dans l’équipe en question sont rares (une douzaine d’accidents de travail sans gravité déclarés entre 2007 et 2013), et un agent (parmi 5) a déclaré une maladie professionnelle.
4.2 Population étudiée
La population étudiée comprend 6 agents territoriaux, dont le chef du service et 5 arboristes-élagueurs. À l’automne 2013, le patrimoine de la Ville se compose de 18 527 arbres d’essences variées. L’équipe est amenée, devant ce volumineux entretien, à faire sous-traiter environ 30 % de ce patrimoine par des entreprises privées. Dans cette recherche, seuls les arboristes-élagueurs de la Ville ont été suivis. Leurs caractéristiques sociodémographiques sont présentées ci-dessous (tableau 1).
Tableau 1. Caractéristiques de la population étudiée
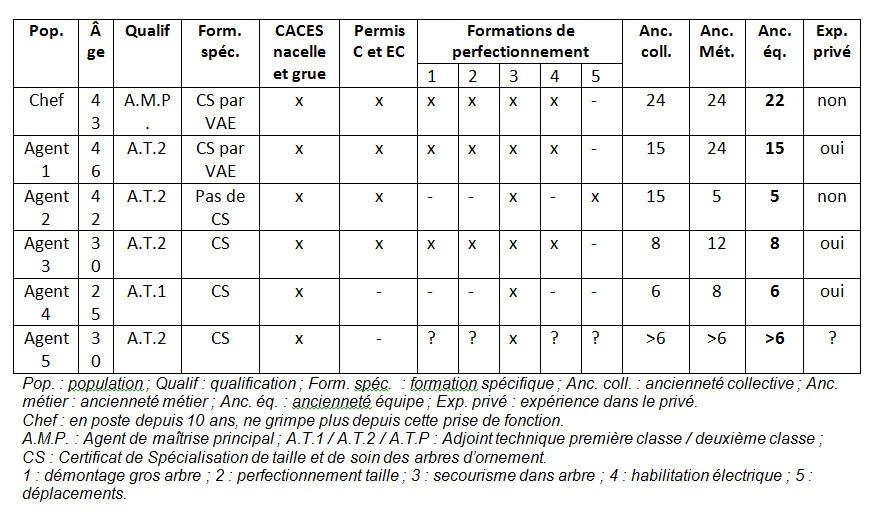
Pop. : population ; Qualif : qualification ; Form. spéc. : formation spécifique ; Anc. coll. : ancienneté collective ; Anc. métier : ancienneté métier ; Anc. éq. : ancienneté équipe ; Exp. privé : expérience dans le privé Chef : en poste depuis 10 ans, ne grimpe plus depuis cette prise de fonction A.M.P. : Agent de maîtrise principal ; A.T.1 / A.T.2 / A.T.P : Adjoint technique première classe / deuxième classe ; CS : Certificat de Spécialisation de taille et de soin des arbres d’ornement 1 : démontage gros arbre ; 2 : perfectionnement taille ; 3 : secourisme dans arbre ; 4 : habilitation électrique ; 5 : déplacements
Il est possible d’observer que la population est plutôt jeune (entre 25 et 46 ans) et expérimentée au poste et dans le métier (> 5 ans). Deux premiers éléments ont été repérés et auront une importance pour l’analyse des données : l’agent 1 ne grimpe plus à la suite d’une restriction de la médecine du travail, il ne travaille qu’en restant dans la nacelle ; l’agent 2, dernier arrivé dans cette équipe, ne possède pas le Certificat de Spécialité (CS) « Taille et soin aux arbres ».
4.3 Méthodes
Différentes méthodes ont été utilisées au fur et à mesure de l’avancée de cette recherche. Il y a eu en premier lieu une phase d’immersion dont l’objectif a été de créer un climat de confiance. Elle a été suivie d’une phase exploratoire outillée d’entretiens individuels et d’observations ouvertes afin de connaître les enjeux de la réalisation de l’activité. Des enregistrements vidéo ont été réalisés sur différents chantiers. Enfin, des situations filmées retenues de ces observations ont été présentées aux agents lors des entretiens individuels d’auto et allo-confrontation (Mollo et Falzon, 2005 ; Nascimento et Mollo, 2013).
4.3.1 Méthodes de recueil de données
Compte tenu de la période de la recherche (automne-hiver), les chantiers d’intervention observés sont du type taille/élagage. Un chantier d’élagage est caractérisé par une grande variabilité principalement définie par les critères suivants : le type et le nombre d’arbres, la météorologie, le temps imparti, les outils et matériel disponibles (notamment d’accès à l’arbre), la configuration des élagueurs dans l’arbre. Plusieurs situations ont été observées afin de saisir des éléments de variabilité et de dégager dans chaque situation les enjeux et compromis en ce qui a trait à la gestion de la sécurité. L’observation directe des différentes situations de travail dans ce type de chantier, avec une zone de sécurité délimitée au sol, est soumise à des contraintes de visibilité qui nécessitent le recours à des enregistrements vidéo.
L’utilisation d’une caméra numérique à fort zoom, fixée sur un trépied, a permis d’enregistrer les actions des agents. Neuf chantiers ont été observés. Cette technique d’enregistrement a fourni entre six et sept heures de vidéos au total, qui ont été visionnées à plusieurs reprises par le premier auteur afin d’être triées et classées en fonction de l’agent observé et des éléments marquants de leur activité.
Trois situations ont été retenues par les chercheurs pour les entretiens de confrontation, selon les critères suivants : répresentatitivité de la variabilité de l’accès à l’arbre et enjeux identifiés concernant la gestion de la sécurité. Elles concernent :
-
l’accès à l’arbre par nacelle, un homme dans l’arbre/un homme autour de l’arbre ; conditions climatiques favorables ; arbre considéré simple ; (situation d’élagage 1)
-
l’accès à l’arbre par échelle, un homme/arbre ; conditions climatiques difficiles, arbre considéré simple ; (situation d’élagage 2) et
-
l’accès à l’arbre par cordes, un binôme dans l’arbre ; conditions climatiques favorables ; arbre considéré compliqué ; (situation d’élagage 3).
Ces situations enregistrées en vidéo, n’ont pas fait l’objet d’un codage au préalable. Elles ont servi de support aux auto-confrontations lors des entretiens individuels avec les agents. 4 arboristes-élagueurs des 5 observés ont participé aux entretiens de confrontation individuelle (agents 1, 2, 3 et 4). Les 3 situations retenues ont été visualisées sur un écran d’ordinateur portable. Ils étaient ainsi confrontés à leurs propres actions ainsi qu’à celles de leurs collègues. Les questions posées visaient l’explicitation des compétences à propos de la gestion de la sécurité et les compromis réalisés entre les différentes dimensions de l’activité, notamment l’efficience et l’efficacité.
Chaque entretien a duré en moyenne 35 minutes. Les données verbales issues de ces entretiens ont été enregistrées, retranscrites et analysées au travers de l’analyse de contenu manuelle.
4.3.2 Méthodes d’analyse de données
Le traitement des données verbales issues des quatre entretiens s’est fait à partir d’une analyse de contenu manuelle. Le choix des thématiques codées s’est fait à partir des critères de variabilité identifiés lors de la sélection des trois situations, à savoir : l’accès à l’arbre, les conditions climatiques, le nombre d’agents et les types outils utilisés, ainsi que le caractère simple ou compliqué de l’arbre du point de vue des opérateurs (architecture et type de taille).
Dans un premier temps, l’analyse de ces trois situations visait à mettre en lumière les contraintes, les ressources, les critères de répartition du travail et les stratégies de prévention en fonction de la configuration du chantier retenu. Les résultats sont présentés au point 5.1.
Dans un second temps, l’analyse de ces trois situations a permis de comprendre la dimension productive de l’activité (l’efficience et l’efficacité) et la dimension sécuritaire de l’activité (sécurité en action). Les catégories comprennent : i) les résultats des soins prodigués à l’arbre (répondant à l’objectif d’efficacité), ii) l’utilisation optimale des ressources pour éviter la fatigue et les douleurs (répondant à l’objectif d’efficience), iii) les stratégies situées de prévention d’accidents pour soi et pour les autres (répondant à l’objectif de la sécurité en action). Elles sont présentées dans le tableau 2. Il a été possible d’identifier et d’analyser les conflits entre les dimensions représentées dans ces catégories ainsi que les compromis réalisés. Les résultats de ces analyses sont présentés au point 5.2.
Tableau 2. Catégories de codage et leur définition

5. Résultats
Les résultats sont présentés en deux parties. Ils reprennent tout d’abord l’interprétation des données au cas par cas, selon les situations retenues et présentées en entretien de confrontation. Les dimensions de sécurité en action, d’efficience et d’efficacité sont ainsi abordées de manière située en rapport avec le cas. La deuxième partie présente l’interprétation des données de manière globale et en fait la synthèse selon ces trois dimensions, ainsi que des conflits et compromis identifiés.
5.1 Les différentes configurations du chantier d’élagage : travail collectif et stratégies de prévention
5.1.1 Accès à l’arbre par nacelle, un homme dans l’arbre/un homme autour de l’arbre
La présence de la nacelle constitue un moyen d’accès à l’arbre efficient et sûr, mais pas toujours efficace, car elle permet le travail d’élagage seulement en périphérie de l’arbre. Un deuxième agent est nécessaire dans ce cas afin d’assurer l’élagage au centre de l’arbre. Cette répartition participe à la sécurité de l’agent grimpeur puisqu’elle lui évite de s’éloigner du fût de l’arbre pour élaguer les branches périphériques. Cette situation est illustrée ci-dessous. Les conditions climatiques étaient favorables ce jour.
Fig. 1
Figure 1. Situation d’élagage 1

Source : données de la recherche
Ce jour-là, le grimpeur travaillant dans l’arbre (agent 2), a choisi le grimper cordé à l’anglaise comme moyen d’accès à l’arbre.
« Je ne trouve pas utile de mettre l’échelle sur un truc comme ça. Puis même si c’est plus haut, quand tu as une branche accessible, c’est un peu bête de mettre une échelle. »
Cet agent explique ensuite qu’il ne fait pas confiance à l’échelle, puisqu’elle bouge trop, et préfère utiliser les cordes.
Le binôme ici observé s’est constitué de manière informelle puis il est devenu pérenne du fait de la transmission de savoirs entre l’agent 1 (le plus expérimenté qui reste toujours à la nacelle) et l’agent 2 (le dernier arrivé dans l’équipe, sans qualification formelle). Le type de configuration nacelle/centre de l’arbre favorise les échanges.
« Je n’ai pas fait d’école, c’est pour ça que je m’en sors moins bien que les autres. J’ai appris en les regardant tous faire. Par exemple, quand il n’est pas loin, que moi je suis dans l’arbre et lui à la nacelle, je lui demande : « Tiens, comment je peux faire ? Comment mettre mes pieds ? Etc. » » (Agent 2).
Ceci est confirmé par l’agent 1, qui reconnaît son rôle dans la transmission du fait de son expérience dans le métier
« Je suis le plus ancien, les gars viennent toujours me demander. Il (l’agent 2) il n’y connaît rien, c’est un jardinier, il vient toujours me demander. Je connais très bien mon métier, et j’ai l’expérience. »
Les échanges concernent tant les gestes techniques et l’usage des équipements que l’entretien des arbres. Dans ce cas, la taille d’éclaircie est demandée. Elle fait partie des tailles douces qui demandent à l’agent une réflexion et un choix dans sa coupe afin de respecter la forme la plus naturelle possible de l’arbre en optimisant sa vitalité.
5.1.2 Accès à l’arbre par échelle, un homme/arbre
Pour cette situation au jour observé, le choix d’accès à l’arbre était réduit à deux possibilités : un accès par l’échelle ou par le grimper cordé, la nacelle n’étant pas disponible. L’absence de la nacelle ce jour a obligé les grimpeurs à effectuer la taille en périphérie en partant du centre de l’arbre. Ceci a considérablement augmenté le nombre de déplacements le long des branches pour atteindre les zones éloignées du fût de l’arbre. Sans l’aide de l’agent à la nacelle, les grimpeurs, pour atteindre le bout de branche, reproduisent plusieurs fois les mêmes actions dans le maniement des cordes pour se déplacer, et/ou tendent leur corps au maximum en maniant à bout de bras l’élagueuse pour atteindre et couper les branches les plus éloignées. Cette configuration de chantier est illustrée ci-dessous.
Fig. 2
Figure 2. Situation d’élagage 2

Source : données de la recherche
Il s’agit d’un alignement d’arbres de petite envergure sur la chaussée publique. La prescription est un retour à l’ancienne coupe (RAC). Le temps moyen pour un élagueur par arbre est d’une demi-heure. La situation est décrite par les agents comme « facile », du fait de l’architecture simple de l’arbre et du type de prescription : une RAC suppose de tailler toutes les jeunes branches, sans choix particulier quant aux branches à ne pas couper.
Les arbres sont alignés sur la chaussée, les agents accèdent chacun à un arbre et gèrent de façon individuelle l’arbre en cours d’élagage. Les agents indiquent que dans ce type de chantier, on ne choisit pas son arbre, la répartition se fait par ordre de descente du camion :
« On ne va pas choisir son arbre s’il y a une ligne à faire. Ça ne sera pas logique que tu tapes en plein milieu, car si celle du milieu est plus facile, ça pourrait être mal interprété. » (Agent 3).
L’homme de pied présent fait respecter la zone de sécurité délimitée et rapproche les branches au sol près des troncs, afin de faire des tas pour faciliter leur transfert vers le broyeur. L’agent nacelliste (agent 1) est resté au sol, du fait de sa restriction en lien avec une maladie professionnelle.
Les deux agents suivis ce jour, l’agent 3 travaillant sur l’arbre signalisé C et l’agent 5 travaillant sur l’arbre A, ont choisi l’échelle comme moyen d’accès compte tenu de la grande taille de l’arbre. Dans les deux cas, la règle de sécurité qui consiste à d’abord se fixer à l’arbre avant d’entamer une ascension à l’échelle n’est pas respectée.
« Dans la réglementation, même quand tu montes à l’échelle, tu devrais être attaché. C’est-à-dire que le petit sac que j’ai passé de mon côté, on devrait le faire systématiquement, même si on monte à l’échelle. On doit être toujours attaché. On ne doit pas pouvoir tomber de l’arbre. » (Agent 4).
Les agents expliquent qu’ils ne le font jamais, car ils le considèrent comme contre-productif. Ils précisent que passer sa corde de rappel implique de choisir une fourche, puis de fixer la corde à son harnais, ce qui correspond aux mêmes gestes que de démarrer une ascension au grimper cordé. Ils indiquent que finalement, si ces étapes sont faites, autant continuer l’ascension avec un grimper cordé plutôt que de solliciter l’échelle et une aide pour en assurer la stabilité. Une fois dans l’arbre, ils entament les procédures de sécurité consistant à s’attacher. Passer outre cette règle de sécurité pour favoriser l’efficience est possible grâce à la sécurité en action, où l’attention est accrue :
« Ah, là je fais attention, je ne fais pas le fou fou tant que je ne suis pas attaché, en bout d’échelle. Après, oui, mais qu’une fois attaché, car il n’y a plus aucun danger. » (Agent 3)
Les conditions climatiques en ce jour de février étaient mauvaises avec une forte pluie sans vent.
« C’est plus fatiguant parce que les cordes ne peuvent pas retenir tes pieds si tu glisses, donc tu te tiens. Tu es obligé de forcer pour te retenir aux branches. » (Agent 3).
Le fait de se retenir aux branches, comme nous verrons plus tard, réduit l’efficience des déplacements et augmente la fatigue. Afin de prévenir les risques de glissades et chutes, la sécurité en action consiste à laisser lors de leurs coupes des « chicots » qui leur servent de point d’appui pour les pieds. Ces chicots seront coupés dans un second temps.
« Je coupe les branches différemment pour me laisser un petit chicot pour caler mes pieds pour ne pas glisser, que je coupe après. » (Agent 3).
L’arbre est ainsi abordé en deux temps, la gestion de la sécurité étant structurante par rapport à l’efficacité de la coupe.
5.1.3 Accès à l’arbre par cordes, un binôme dans l’arbre
Dans cette situation, compte tenu de la dimension de l’arbre, le travail en binôme est prescrit. Cette situation est plutôt particulière et moins fréquente que celles précédemment décrites. Il est en effet plutôt rare d’avoir des arbres d’une telle envergure en centre-ville. L’activité dans cette situation se déploie dans un parc peu fréquenté, sans zone de sécurité bien délimitée. Chaque agent prend un côté de l’arbre. L’agent 3 a choisi le côté considéré le plus simple à faire (à gauche de l’image ci-dessous), car son binôme (agent 4) a un accès plus facile aux branches du haut :
« J’ai dû prendre au plus simple pour grimper pour moi, car comme il grimpe avec le petit sac, il peut grimper de n’importe où : il chope une branche en haut, puis il installe sa corde. ».
Il indique que ce type de répartition se fait de manière implicite et tient compte des outils, mais aussi de l’état de fatigue de chacun :
« Pour de vrai, ça arrive : voilà il y a un grand côté, un petit côté, t’es fatigué, tu n’es pas fatigué, bon bah voilà. On s’arrange. »
Deux techniques ont été observées pour l’accès à l’arbre selon l’agent : un grimper cordé au footlock et une grimpe avec les griffes et longe.
Fig. 3
Figure 3. Situation d’élagage 3

Source : données de la recherche
L’activité est décrite par ces agents comme étant « facile » grâce à une prescription de taille type RAC, ce qui n’implique pas de choix soignés dans les branches à couper. Les conditions climatiques sont favorables et les branches longues sont plutôt stables. Même si le volume des branches à tailler est important (en moyenne, une branche qui tombe ici mesure entre 3 et 5 mètres de long), cette tâche ne nécessite pas une attention soutenue concernant la chute des branches, puisqu’il s’agit d’une zone non passante, sans contraintes particulières au sol. Les plus grandes branches sont coupées en dernièr, car elles sont utilisées comme moyens de rétention des agents en cas de chutes :
« Je l’ai faite en dernière parce que si j’étais déséquilibré ou quoi, j’avais une grosse branche derrière moi pour me rattraper. » (Agent 4).
Les agents sont exceptionnellement équipés de leurs griffes afin de favoriser une bonne accroche des pieds sur les branches et d’augmenter ainsi leurs marges de manœuvre lors de leurs déplacements et de l’élagage. Ce choix, qui favorise l’efficience et la sécurité, a un impact sur l’efficacité, dans le sens où l’arbre peut être abîmé :
« Normalement, on ne met pas de griffes pour l’élagage, uniquement pour le démontage d’arbres. Car ce n’est pas terrible de piquer les arbres, mais ceux-là, ils ont été taillés d’une telle façon à l’époque qu’on n’a plus le choix que de mettre les griffes pour atteindre les branches qu’il y a là-haut. » (Agent 3).
L’agent 4 explique qu’il préfère ne pas mettre ses griffes au moment de l’accès à l’arbre puisque cela le gênerait dans sa montée :
« Je ne les avais pas parce que je me sers de mes pieds pour grimper le long de la corde. Et si je mets mes griffes, la ferraille et les pointes vont me gêner. Donc je les ai emmenées et je les ai enfilées lorsque je ne pouvais plus monter plus haut avec la corde. Après j’ai continué à grimper avec les griffes et la longe. ».
L’entraide entre les deux agents dépasse la répartition de l’arbre en côté droit et gauche. L’agent 3 qui a fini son côté de l’arbre, est descendu et s’est aperçu que son collègue ne finirait pas à temps (c’est la fin de l’après-midi).
« C’est vraiment pour l’aider que je suis reparti de l’autre côté, parce que j’avais fini et j’étais redescendu. Et quand j’ai regardé l’heure, bon bah voilà. »
Malgré la douleur ressentie au genou, il a décidé de remonter l’arbre en utilisant une autre technique qui permet de préserver son genou même si celle-ci est reconnue comme moins efficiente et plus génératrice de fatigue :
« J’avais mal au genou. Au départ, lors de la première montée, je coince ma corde sur ma chaussure, et j’utilise mes jambes et je force sur les genoux pour grimper et je n’ai plus qu’à faire suivre mon prussik. Là, je force plus sur mes bras. »
L’objectif de finir la tâche et aider son collègue prend le dessus sur une fatigue accumulée (et la potentialité de se faire mal pour cet agent se plaignant de douleurs au genou).
5.2 La sécurité en action comme structurante de l’action efficiente et efficace sur les arbres
5.2.1 L’efficience dans l’usage de son corps et des équipements de travail
Les trois agents les plus expérimentés parlent de l’importance de bien connaître les équipements de travail et de savoir les utiliser de manière à permettre des déplacements à la fois moins coûteux physiquement et plus sûrs. La maîtrise de la peur a été évoquée par les agents et apparaît comme une condition préalable à la réalisation d’un travail efficient.
« Tu ne peux pas faire ce métier-là si tu as peur. »
On comprend par la suite que ne pas avoir peur nécessite de « faire confiance » à ses cordes, et ce faisant, permet d’avoir les deux bras libres pour l’élagage et de reposer son corps sur le harnais.
« Quelqu’un qui commence en élagage, un arbre et il va être crevé, parce qu’il ne va pas savoir utiliser ses jambes et ses genoux, mais que ses bras. Quand t’as confiance dans les cordes, tu te laisses aller et tu reposes tout. » (Agent 3).
Faire confiance à ses cordes signifie en réalité faire confiance à ses compétences d’ancrage du matériel, ce qui constituerait un point préalable à l’action efficiente et efficace sur les arbres, comme le souligne l’agent 4 :
« Mes formateurs m’ont appris dès le début à avoir confiance en notre matériel et à bien choisir nos ancrages pour pouvoir être confiant dans nos ancrages et notre matériel pour ne pas avoir trop d’appréhension et pouvoir circuler partout dans l’arbre. Comme ça je peux me dire que je suis en sécurité et là c’est bon, je peux travailler librement. ».
Ces agents ne nient pas la dimension physique de leur travail et la fatigue ressentie en fin de journée, mais ils mettent en lumière que la réduction de la fatigue passe par l’efficience dans l’usage de leur corps et des équipements de travail.
« Oui, c’est physique, c’est crevant, et encore plus si tu n’utilises pas bien ton matériel. » (Agent 3)
Se tenir à une branche peut être rassurant, malgré le coût physique engendré. On voit ainsi un conflit entre sécurité et efficience, avec des conséquences sur la santé. En effet, deux agents (agents 2 et 5) sont sujets à se tenir de façon récurrente à une branche, afin d’assurer leur sécurité ou leur sentiment de sécurité.
« Ils sont toujours à tenir une branche, donc ils n’ont pas les deux mains libres. C’est peut-être une question de peur, mais tu forces plus, donc tu es plus fatigué. » (Agent 3).
Ceci est confirmé par l’agent le moins expérimenté qui affirme qu’au début il avait peur que les cordes ne tiennent pas, ce qui le conduisait à la regarder tout le temps, ainsi que ses points d’ancrage.
« Maintenant ça va, je grimpe comme eux, mais au départ, je grimpais en m’agrippant aux branches, ce qui est un tort par ce que la corde est tout le temps détendue, donc là, je glisse, je refais une chute de trois mètres ou un truc comme ça. Je force toujours un peu en montant, mais je suis plus en sécurité maintenant. Ça, c’est pareil, je l’ai appris sur le tas au fur et à mesure. » (Agent 2)
5.2.2 La gestion des risques pour soi et pour les autres
Concernant les risques pour les autres, les agents donnent l’exemple de la chute ou rebond d’une branche coupée qui blesserait au sol un opérateur ou un riverain. L’opérateur doit se créer un « couloir visuel » de sa zone de travail en hauteur pour surveiller la zone au sol et appliquer ensuite la consigne qui est de s’assurer qu’avant de couper une branche, il n’y ait personne en dessous. Or, cette tâche n’est pas forcément évidente : d’une part, le grimpeur peut avoir sa vision du sol gênée par l’arbre lui-même malgré ce « couloir visuel », et d’autre part, lorsqu’il commence à couper sa branche, son attention va se focaliser sur son trait de coupe au détriment de l’environnement. C’est pour cette raison que dans la règle, le relais est pris par les hommes de pied. Les résultats montrent qu’il est principalement pris en charge par l’agent le plus ancien qui est sur la nacelle.
« Des fois, ils ne peuvent pas voir quand ils sont dans l’arbre, mais souvent, c’est qu’ils ne font pas gaffe […] je suis le plus ancien, alors forcément, je suis le plus expérimenté, je vois ce qui se passe et ce qui risque d’arriver, comme des branches qui tombent mal. » (Agent 1).
Nous avons vu que cet opérateur ancien a un rôle dans la transmission de savoirs vers les plus jeunes, mais également dans la garantie de la sécurité collective. Le fait d’être sur la nacelle lui procure une certaine préservation physique qui n’efface pas pour autant un sentiment de fatigue mentale.
« Dans la nacelle c’est moins physique ! J’ai fait mon temps à faire le clown. C’est surtout dans la tête que je suis fatigué : faire tout le temps gaffe à ce que font les autres, c’est fatigant. »
La glissade et/ou la chute constituent les risques individuels les plus courus dans le métier, ils sont d’autant redoutés en cas de conditions météorologiques défavorables.
« Quand il y a des tempêtes et que ça bouge dans tous les sens et qu’en fin de compte, ce n’est pas toi qui décides de ce qu’il va se passer, tu ne sais pas si l’arbre il va tenir ou pas. » (Agent 4)
Comme vu précédemment, les compétences d’ancrage des cordes et les stratégies lors des déplacements dans l’arbre permettent de réduire ce risque :
« Je pense tout le temps à ma sécurité, je fais attention à ce que je fais. Je n’ai pas vraiment d’appréhension ».
Ils sont associés à d’autres savoir-faire de prudence, comme laisser un « chicot » ou une branche pour s’appuyer/se retenir en cas de chute. Pour la mise en œuvre de ces stratégies, il est nécessaire d’avoir une bonne connaissance de l’arbre et de sa physiologie afin de repérer les branches les plus fragiles.
« Dans des cas particuliers, sur les essences plus fragiles sujettes à la casse, je surveille beaucoup plus et j’y vais en douceur. » (Agent 4)
La règle de sécurité pour réduire le risque de chute consiste en la recherche d’un deuxième point d’ancrage. Ceci signifie accrocher sa corde et sa longe.
« Logiquement, la règle en élagage, qu’on ne fait pas du tout là, c’est d’être attaché avec deux points d’ancrage pour pouvoir utiliser la tronçonneuse : ta longe et ta corde. Personnellement, je le fais une fois sur trois quand je suis déséquilibré, si je ne le suis pas, je coupe juste avec ma corde. » (Agent 4).
La règle de sécurité n’est pas respectée dans tous les cas, car elle est considérée comme contre-productive, en réduisant les possibilités de déplacements dans l’arbre (efficience) et l’efficacité des soins.
« La longe, c’est juste fait pour grimper avec les griffes, une fois que tu es en haut de l’arbre, tu l’enlèves, parce qu’elle te colle au tronc et tu ne peux rien faire. » (Agent 3).
La sécurité en action consiste ici à l’utiliser seulement dans les cas précis où il y a un fort risque de déséquilibre.
La dimension temporelle est à considérer dans la sécurité en action. Les agents disent pouvoir prendre le temps dans le cas de situations identifiées comme dangereuses, ce qui n’était pas forcément le cas lorsqu’ils travaillaient dans des entreprises privées :
« Là, ça va, on y va tranquillement, on ne court pas dans l’arbre. Dans le privé, on nous demande beaucoup plus de rendement. » (Agent 3).
5.2.3 L’efficacité dans les soins prodigués à l’arbre
L’efficacité concerne le résultat des soins prodigués à l’arbre, c’est-à-dire la qualité de la coupe en fonction des besoins physiologiques de l’arbre et de l’esthétisme recherché. En effet, les soins ont pour objectif d’optimiser la vitalité de l’arbre tout en lui donnant une forme qui doit à la fois répondre aux contraintes de l’environnement urbain et au critère de beauté : la belle esthétique de l’arbre est celle qui se rapproche le plus de sa forme naturelle. Atteindre cet objectif nécessite des compétences techniques et des connaissances sur la physiologie de l’arbre.
« Il ne faut pas couper trop haut le bourrelet, sinon ça lui fait tout ce morceau de bois à remonter pour recouvrir. Il ne faut pas non plus couper trop à ras, sinon on va abîmer ce bourrelet et retarder la cicatrisation de la plaie. Il faut être au ras du bourrelet, sans y toucher. » (Agent 4)
Les agents indiquent que gagner en esthétique de coupe vient avec l’expérience de la vision d’ensemble de l’arbre.
La vision de l’ensemble de l’arbre est une compétence utile pour l’efficacité, mais aussi pour la sécurité. Nous avons vu les anticipations réalisées par les agents lorsqu’ils laissent les grandes branches à couper en dernièr, ou encore quand ils coupent des chicots de sécurité qui seront supprimés seulement en fin d’élagage. Ces stratégies permettent de construire un environnement moins dangereux, de repérer les branches à couper et le trait de coupe à réaliser afin de maintenir l’harmonie du paysage. Cette compétence de vue d’ensemble de l’arbre s’acquiert avec l’expérience, comme indiqué par le chef d’équipe :
« qu’il faut que l’arbre garde sa forme naturelle, ça vient avec l’expérience ».
En plus, ceci demande de pouvoir accéder à toutes les branches nécessitant un soin : les plus proches, comme les plus éloignées. Les déplacements dans l’arbre sont donc à réaliser en conséquence. Les dimensions productive (efficacité et l’efficience) et sécuritaire de l’activité apparaissent ainsi imbriquées dans les savoir-faire de métier.
6. Conclusion et discussion
Les résultats de cette recherche collaborent pour la compréhension d’une activité très peu étudiée en général, et plus spécifiquement en ergonomie. Ils corroborent les travaux de Bardekjian (2015) qui mettent en lumière le caractère risqué de cette activité et l’importance du travail collectif pour la gestion de la sécurité (security) et la préservation de la santé (safety).
En accord avec la définition de De Terssac et Gaillard (2009), les résultats montrent que la sécurité en action ne s’exprime pas toujours de manière optimale au regard des règles de sécurité (sécurité réglée). L’application des règles de sécurité apparaît dans nos données comme contre-productive. Les agents sont confrontés à des conflits d’objectifs entre sécurité réglée et efficience, comme dans le cas où ils choisissent de ne pas s’accrocher à l’échelle, car l’effort demandé serait équivalent à celui de monter directement par les cordes. Ils préservent leurs ressources en prenant l’échelle, ne s’accrochent pas et font davantage attention à leur montée. Cet arbitrage vis-à-vis de la sécurité réglée n’en est pas vraiment un vis-vis de la sécurité en action. Les agents assurent leur sécurité en fonction de la situation, en adaptant ou écartant les règles qu’ils considèrent inadaptées. Les agents sont également confrontés à des conflits entre la sécurité en action et l’efficacité. Utiliser des griffes pour monter dans un arbre est interdit à cause des conséquences négatives que cela peut représenter sur la santé et/ou l’esthétique des arbres. Néanmoins, pour des soucis de sécurité, les agents peuvent avoir recours à cette option. L’arbitrage se fait ici vis-à-vis de l’efficacité afin de réduire les risques de chutes. Enfin, les résultats montrent que les agents peuvent être pris dans des situations de conflit que comprennent ces trois dimensions interdépendantes. Par exemple, utiliser un deuxième point d’ancrage avec la longe comme prescrit par la règle de sécurité n’est pas toujours approprié puisque la longe peut gêner les déplacements dans l’arbre et empêcher la vue d’ensemble. D’une part, cela a un impact sur l’efficience demandant plus d’effort. D’autre part, cela rend difficile l’accès aisé aux branches pour réaliser la taille (efficacité).
Des situations de conflit d’objectifs telles que retrouvées dans nos résultats font l’objet d’une vaste littérature en ergonomie (Caroly et Weill-Fassina, 2004 ; Gaudart, 1996 ; Toupin, 2008). L’apport de cette recherche consiste dans l’identification et dans la démonstration de la sécurité en action comme structurante pour le travail dans les arbres. Les compétences d’ancrage du matériel, par exemple, constitueraient un point préalable à l’action efficiente et efficace sur et dans les arbres, tout comme la construction d’un environnement arboré moins dangereux (s’appuyer sur les grandes branches non encore coupées, tailler des chicots pour l’appui). Ces compétences permettent de se sentir en sécurité, favorisant les déplacements dans l’arbre et réduisant les coûts physiques engendrés par l’usage de membres supérieurs pour se tenir aux branches. En plus, avoir les bras libres facilite le maniement de la tronçonneuse. Les agents qui n’ont pas développé ces compétences ne sont pas considérés comme étant du métier, comme c’est le cas de l’agent qui est dans cette équipe depuis plus de cinq ans (agent 2) et est toujours considéré comme « ardinier ». En suivant Kouabenan (2007), nous constatons que le sentiment de sécurité dépend non seulement des
« caractéristiques intrinsèques du risque, mais aussi de la croyance en ses capacités personnelles à y faire face et de la position d’acteur qu’on occupe ».
En matière d’intervention, au-delà des moments de transmission de savoirs en situation, des confrontations collectives de tous les membres de l’équipe à partir de l’analyse de l’activité pourraient être envisagées. Elle favoriseraient notamment « l’intégration » de l’agent 3 dans le métier. En effet, l’objectivation de l’activité des aboristes-élagueurs a permis de lui donner une
« forme dont la pensée peut se saisir, pour en parler, pour la manipuler, pour réfléchir individuellement et collectivement. » (Béguin, 2007).
Il est admis en ergonomie que cette objectivation associée à la participation des opérateurs permet de la constituer en ressource susceptible de favoriser le développement de compétences (Teiger, 1993 ; Clot, 2000 ; Mollo, 2004).
Enfin, cette recherche ouvre à notre sens deux perspectives scientifiques. La première concerne le rôle du sentiment de sécurité (ou de la peur) dans la construction de compétences pour agir en sécurité tout en assurant efficience et efficacité. La deuxième est en lien avec la caractérisation de ce type de système de travail par rapport aux champs théoriques de la fiabilité humaine et organisationnelle. Nous serions tentées de parler de culture de sécurité dans ce métier (Nascimento, 2011 ; Rocha, 2014) dans le sens où : 1) la priorité est donnée à la dimension sécuritaire de l’activité en cas de conflit avec la dimension productive ; 2) la dimension productive est dépendante de la sécurité en action.
Parties annexes
Bibliographie
- Amalberti, R. (1992). Safety in process-control : An operator-centred point of view. Reliability Engineering and System Safety , 38, 99-108.
- Amalberti, R. (2007). Ultrasécurité, une épée de Damoclès pour les hautes technologies. Dossiers de la recherche , 26, 74-81.
- Bailer, A.J., Reed, L.D., Stayner, L.T. (1997). Modeling fatal injury rates using Poisson regression : A case study of workers in agriculture, forestry, and fishing. Journal of Safety Research , 28, 3, 177-186.
- Bardekjian, A.C. (2015). Towards social arboriculture : Arborists’ perspectives on urban forest labour in Southern Ontario, Canada. Urban Forestry & Urban Greening , 9, 255-262.
- Béguin, P. (2007). Innovation et cadre sociocognitif des interactions concepteurs-opérateurs : une approche développementale. Le travail humain , 70, 4, 369-390.
- Bortolini, L., Cividino, S., Gubiani, R., Cecchini, M., Delfanti, L., Colantoni, A. (2016). Urban green spaces activities : A preparatory groundwork for a safety management system. Journal of Safety Research , 56, 75-82.
- Bourgeois, F., Hubault, F. (2005). Prévenir les TMS, de la biomécanique à la revalorisation du travail, l’analyse du geste dans toutes ses dimensions. Activités , 2-1, 20-35.
- Bourrier, M. (2001). Organiser la fiabilité . Paris, L’Harmattan.
- Caroly, S., Weill-Fassina, A. (2004). Évolutions des régulations de situations critiques au cours de la vie professionnelle dans des activités de relations de service. Le travail humain , 67, 4, 304-327.
- Clot, Y. (2000). La formation par l’analyse du travail : pour une troisième voie. Dans, Manière de penser, manières d’agir en éducation et en formation , eds B., Maggi, pp 133-156. Presses Universitaires de France, Paris.
- Colantoni, A., Marucci, A., Monarca, D., Pagniello, B., Cecchini, M., Bedini, R. (2012). The risk of musculoskeletal disorders due to repetitive movements of upper limbs for workers employed to vegetable grafting. Journal of Food, Agriculture and Environment , 10, 14-18.
- Daniellou, F. (2012). Facteurs humains et organisationnels de la sécurité industrielle. Des questions pour progresser . FonCSI, Toulouse.
- De Terssac, G., Gaillard, I. (2009). La sécurité en action . Octares édition, Toulouse.
- Dekker, S. (2003). Failure to adapt or adaptations that fail : contrasting models on procedures and safety. Applied Ergonomics , 34, 233-238.
- Dien, Y. (1998). Safety and application of procedures, or how do « they » have to use operating procedures in nuclear power plants ? Safety Science , 29, 3, 179-187.
- Dozier, H., Machtmes, K. (2005). Arborists in Louisiana, U.S. : a baseline assessment of safety and professionalism. J. Arboricult ., 31, 5, 228-234.
- Gathright, J., Yamada, Y., Morita, M. (2006). Comparison of the physiological and psychological benefits of tree and tower climbing. Urban Forestry and Urban Greening , 5, 141-149.
- Gaudart, C. (1996). Transformations de l’activité avec l’âge dans des tâches de montage automobile sur chaîne . Thèse de doctorat d’ergonomie, EPHE, Paris.
- Koeser, A., Klein, R., Hasing G., Northrop, R. (2015). Factors driving professional and public urban tree risk perception. Urban Forestry and Urban Greening , 14, 968-974.
- Kouabenan, D.R. (2007). Incertitude, croyances et management de la sécurité. Le travail humain , 70, 3, 271-287.
- Lee, A.C.K., Maheswaran, R. (2011). The health benefits of urban green spaces : A review of the evidence. Journal of Public Health , 33, 2, 212-222.
- Lilley, R., Feyer, A.M., Kirk, P., Gander, P.A. (2002). Survey of forest workers in New Zealand. Do hours of work, rest, and recovery play a role in accidents and injury ? Journal of Safety Research , 33, 1, 53-71.
- Lindroos, O., Burström, L. (2010). Accident rates and types among self-employed private forest owners. Accident Analysis and Prevention , 42, 6, 1729-1735.
- Lundqvist, P., Gustafsson, B. (1992). Accidents and accident prevention in agriculture a review of selected studies. International Journal of Industrial Ergonomics , 10, 4, 311-319.
- Madureira, H., Andresen, T., Monteiro, A. (2011). Green structure and planning evolution in Porto. Urban Forestry and Urban Greening , 10, 2, 141-149.
- Mollo, V. (2004). Usage des ressources, adaptation des savoirs et gestion de l’autonomie dans la décision thérapeutique . Thèse de doctorat d’ergonomie, Cnam, Paris.
- Naess, P. (2001). Urban planning and sustainable development. European Planning Studies , 9, 4, 503-524.
- Nascimento, A. (2011). Sécurité des patients et culture de sécurité : une revue de la littérature. Ciência & Saúde Coletiva , 16, 3591-3602.
- Nascimento, A., Cuvelier, L., Mollo, V., Dicioccio, A., Falzon, P. (2013). Construire la sécurité : du normatif à l’adaptatif. Dans, Ergonomie constructive, eds P., Falzon, pp 103-116. Presses Universitaires de France, Paris.
- Nowak, D.J., Crane, D.E., Stevens, J.C. (2006). Air pollution removal by urban trees and shrubs in the United States. Urban Forestry and Urban Greening , 4, 3-4, 115-123.
- Rocha, R. (2014). Du silence organisationnel au développement du débat structuré sur le travail : les effets sur la sécurité et sur l’organisation . Thèse de doctorat d’ergonomie. Université de Bordeaux.
- Teiger, C. (1993). Représentation du travail et travail de la représentation. Dans, Représentation pour l’action , eds A., Weill-Fassina, P., Rabardel, D., Dubois, pp 311-344. Octares editions, Toulouse.
- Toupin, C. (2008). Expérience et redéfinition de la tâche dans le travail des infirmières de nuit : Une recherche menée dans des unités de pneumologie . Thèse de doctorat d’ergonomie, Cnam, Paris.
- Young, R.F. (2010). Managing municipal green space for ecosystem services. Urban Forestry and Urban Greening, 9, 4, 313-321.
Liste des figures
Fig. 1
Figure 1. Situation d’élagage 1
Source : données de la recherche
Fig. 2
Figure 2. Situation d’élagage 2
Source : données de la recherche
Fig. 3
Figure 3. Situation d’élagage 3
Source : données de la recherche
Liste des tableaux
Tableau 1. Caractéristiques de la population étudiée
Pop. : population ; Qualif : qualification ; Form. spéc. : formation spécifique ; Anc. coll. : ancienneté collective ; Anc. métier : ancienneté métier ; Anc. éq. : ancienneté équipe ; Exp. privé : expérience dans le privé Chef : en poste depuis 10 ans, ne grimpe plus depuis cette prise de fonction A.M.P. : Agent de maîtrise principal ; A.T.1 / A.T.2 / A.T.P : Adjoint technique première classe / deuxième classe ; CS : Certificat de Spécialisation de taille et de soin des arbres d’ornement 1 : démontage gros arbre ; 2 : perfectionnement taille ; 3 : secourisme dans arbre ; 4 : habilitation électrique ; 5 : déplacements
Tableau 2. Catégories de codage et leur définition