Résumés
Abstract
Musculoskeletal disorders (MSDs) are one of the main causes of work disability (EU-OSHA, 2019; WHO, 2019). Several solutions, including the cobotic system (EUROGIP, 2017), have been put forward to improve unhealthy working conditions and prevent MSDs. We sought to identify the MSD risk factors of workers on a screen-printed glass production line prior to introduction of a cobot. We used a mixed data collection technique: video observations and assessment of MSD risk factors by expert ergonomists, and then self-confrontation interviews with six production-line operators and subjective perception of risk factors. The two types of assessment (by experts and by operators) showed that the most demanding risk factors were physical (e.g., work posture) and psychosocial (e.g., mental workload). Certain risk factors were viewed differently by the experts and the operators. One question remains: How can a cobot make work more meaningful for operators?
Keywords:
- Industry 4.0,
- Cobot,
- MSDs,
- Subjective experience,
- Meaning of work
Résumé
Les Troubles Musculo-squelettiques (TMS) représentent la plus grande cause d’invalidité au travail (EU-OSHA, 2019; WHO, 2019). Plusieurs solutions sont proposées pour réduire la pénibilité du travail, ses difficultés et prévenir les TMS, parmi elles, figure la cobotique, c’est-à-dire l’implantation en situation de travail de robots coopératifs (EUROGIP, 2017). Dans ce contexte, la présente étude porte sur l’évaluation initiale des facteurs de risques de TMS dans une ligne de production de sérigraphie sur verre avant l’implantation d’un robot coopératif (cobot). Notre étude s’est basée sur une méthode mixte de recueil de données : observations filmées et analyse des facteurs de risque de TMS par des experts en ergonomie, puis entretiens d’auto-confrontation avec les 6 opérateurs de la ligne de production et perception des facteurs de risques par les opérateurs. Les résultats montrent que les facteurs de risques jugés comme les plus pénibles correspondent à la charge physique (e.g. les postures) et à la charge psychosociale (charge mentale) pour les 2 types d’évaluateurs (expert et opérateur). Mais les résultats montrent que les opérateurs entre eux ont des perceptions différentes de certains facteurs de risques. Ces résultats posent la question de comment le cobot pourra soulager les opérateurs des facteurs de risques au regard du sens du travail des opérateurs.
Corps de l’article
1. Introduction
Musculoskeletal disorders (MSDs) are a major health problem at work and impose significant financial, human and societal costs on every country (Bellemare et al., 2019). They are the second most common cause of acquired disabilities in the world (Gallagher & Schall, 2017) and in Europe (EU-OSHA, 2019). In France, according to the health insurance report (AMELI, 2020), MSDs accounted for slightly more than 87% of all work-related illnesses in 2017. They also incur very high economic costs (Department of Employment, Social Affairs and Inclusion (MTEFPDS, 2015)) and are associated with absenteeism and long-term illness (AMELI, 2020; Fjell et al., 2007; Trevelyan & Haslam, 2001; World Health Organization [WHO], 2003), with inability to work (Kuorinka & Forcier, 1995; Leclerc et al., 2015) and with low rates of job retention (Sérazin et al., 2013).
MSDs are caused or made worse by the environment and conditions of the workplace (Forde et al., 2002; Roquelaure, 2018; WHO, 2003; Xu et al., 2013). Most often they are characterized by discomfort and pain in the joints, muscles and soft tissues (Levanon et al., 2012). They may also involve tendinitis, nerve compression syndrome and lower back pain (Whysall et al., 2006). MSDs take multiple forms, and their origins are multifactorial. Epidemiological and ergonomic studies have shown three main categories of causal factors: (1) physical or biomechanical factors (e.g., repetitive movements, extreme or improper postures, excessive physical effort, body vibrations); (2) organizational and psychosocial factors (e.g., organization of tasks, pace of work, job autonomy,[1] work/rest ratio, social support from co-workers and superiors); and (3) sociodemographic and individual factors (e.g., age, sex, education level, medical history, sports or recreational activities) (Bao et al., 2015; Bernard, 1997; Buckle & Devereux, 2002; Caroly et al., 2010; EU-OSHA, 2019; Lafranchi & Duveau, 2008; National Research Council, 2001; Nunes, 2009; Nunes & McCauley-Bush, 2012; Roquelaure et al., 2011).
Because MSDs have become so widespread in the workplace, interest has increased in assessing their risk factors in order to prevent them and their consequences (Bellemare et al., 2019; France's Institute for Research and Security [INRS], 2014, 2015). Unfortunately, there are several obstacles due to the complexity and multicausality of MSDs (Whysall et al., 2004; Landry, 2012). In addition, treatment can be difficult. MSDs do not all have the same etiology, they are perceived differently by different stakeholders and there may be a lack of sufficient time, equipment and skills (Caroly et al., 2008).
The Fourth Industrial Revolution (Industry 4.0) is providing us with technological and ergonomic solutions to MSDs, particularly cobotics or collaborative robotics (Bobillier Chaumon, 2021). Cobotics promises to improve working conditions and reduce difficult and dangerous tasks, in particular those that can lead to MSDs (CEA, 2015; Claverie et al., 2013).
2. Cobotics, Preserving Workers’ Health?
Cobotics is offering a new way of organizing work (Kagermann et al., 2013) and production processes (Lu, 2017) with a view to reaching higher levels of operational efficiency, productivity and automation (Thames & Schaefer, 2016).
The promise of cobotics is multifold: economic, by increasing flexibility and competitiveness; organizational, by providing new forms of human-machine collaboration and by eliminating certain spatial constraints; and ergonomic, by reducing the drudgery of working conditions and by limiting the risks of MSDs (EUROGIP, 2017; Moulières-Seban et al., 2017).
A cobot is a “robotic device that manipulates objects in collaboration with a human operator” (Colgate et al., 1996, p. 433). For Jansen et al. (2018), it is a robot designed to collaborate and interact physically with humans in a shared workspace. There are four types of human-robot collaboration: independent; simultaneous; sequential; and supportive (Colim et al., 2021). “The supportive scenario includes the cases where the robot and operator work together in the same process and workpiece simultaneously” (Colim et al., 2021).
By introducing collaborative robots into industry, it is hoped that workers will be less exposed to the risk factors of MSDs (Claverie et al., 2013; Caroly et al., 2019; Villani et al., 2018). Cobots “support the employee in their actions and adjust their interventions to those of the professional. It is no longer simply a substitute robot or a mechanical aid for certain tasks” (Bobillier Chaumon et al., 2019, p. 17). Humans and cobots thus work together to perform tasks defined by computer programmers, organizational psychologists, ergonomists and others involved in task definition, like managers and human resource departments. For Norman (cited by Bobillier Chaumon et al. 2022, p. 2), cobots “do not only transform the capacities of an individual, they also change the nature of the task that the person accomplishes.” As with any new workplace technology, cobotics can achieve the anticipated results only if designers, computer programmers and ergonomists take into account the employees’ perception of their new “co-workers.” Participatory approaches are the preferred means (Galey et al., 2022) to design human-cobot collaboration, the aim being to minimize exposure to occupational hazards while preserving key activities for the operator (Chahir et al., 2022; Colim et al., 2021). The main challenge is to design safe interaction with intuitive interfaces and accurate task allocation (Villani et al., 2018).
3. Subjective Experience in the Operators’ Assessment of MSD Risk Factors before Cobot Introduction
The introduction of cobots into industry requires, at the design stage, a clear division of production-line tasks between the operator and the cobot (Cardoso et al., 2021). To that end, the tasks are studied and the MSD risk factors assessed with a view to assigning the cobot the most arduous tasks (e.g., weight bearing, rapid and repetitive wide-ranging movements) and the human the most worthwhile and meaningful ones (Cardoso et al., 2021; Isaksen, 2000; Morin, 2008; Vallery et al., 2019). A task refers to an objective to be reached in circumscribed conditions where variations occur (Leplat, 1989). It may be technical, organizational or individual. In contrast, an activity "refers to the worker, to the person or persons carrying out the work. It is what the "operator" mobilizes and deploys in terms of subjectivity, understanding and expertise, intelligence, and also efforts to deal, during his work, with what has not been decided, or even with modifications of what has been decided because it has become unsuitable in a given context" (Guerin et al., 2021, p. 34).
According to Karsh et al. (2001), any assessment of MSDs purporting to be holistic and systematic has to take into account the different factors involved in work. Although more ergonomic interventions are being made to alleviate MSDs, many of them are focused more on physical load factors, and “neglect” the role of psychosocial factors (Cardoso et al., 2021; Whysall et al., 2006). In human-robot collaboration systems, physical ergonomics aims to improve operator posture in real-time (Dimitropoulos, 2021; Kim et al., 2021; Lorenzini et al., 2019; Shafti et al., 2019). Studies in this area rely on instrument-based systems to assess the operator’s physical state through RULA (Rapid Upper Limb Assessment) and REBA (Rapid Entire Body Assessment). Traditional observation is still used by some of the studies reviewed by Cardoso et al. (2021). In all of these methods, ergonomic experts observe the work activity to assess the MSD risk of the external physical workload (Colim et al., 2020; David, 2005).
The psychosocial workload, however, also contributes to MSD risk, as shown by Bourgeois and colleagues (2000), Coutarel and Daniellou (2011) and Grenier-Pezé (2003). By focusing on the individual worker, and the mechanical stress on body tissues caused by various tasks, particularly their repetitiveness, intensity, duration and stress, we may end up ignoring the collective and organizational dimensions of work (Buchmann & Landry, 2010, St Vincent et al., 2011). If a model considers only the external physical workload, it will poorly represent the daily on-the-job experience that develops through the social and subjective history of workers. It is necessary to consider the difficulties they experience to prevent harm to their health (Lasfargues et al., 2005). By taking into account their perceptions, beliefs and knowledge, we can better assess MSDs and prepare workers for organizational change; in this case, introducing a cobot to the production line (Haslam, 2002; Barrett et al., 2005).
On that basis, we sought to assess the MSD risk factors of work before the introduction of a cobot to a screen-printed glass production line, by using a participatory and integrative approach. In particular, we sought to answer two questions:
What are the existing MSD risk factors? And how are they assessed by the experts and by the operators?
Which tasks would the operators delegate to the cobot for future collaboration? Which tasks would they prefer to keep to themselves (because of the lower risk)?
4. Methods
4.1 Overall Procedure
We used a multi-stage approach (Figure 1). First, we took videos of each workstation on the production line. Then we explained to the operator why we had chosen that work situation (see also 4.2). The videos were assessed by four experts, who used an APACT grid. Then, we used the videos to conduct self-confrontation interviews with the operators. Finally, using the results, we created scenarios to simulate the arrival of a cobot on the production line. We will not describe the last stage in this article.
Figure 1
Overall Procedure

4.2 Video Assessment of Production Line Workstations
We made several personal observations to understand the many different production lines. In consultation with the company CEO, we took videos of a specific production line that corresponded to the one where a cobot could be introduced. We filmed the workstations both at the entrance to the oven (work processes: placing the products on the conveyor belt, screen printing and visual inspection) and at the exit (work processes: visual inspection, placing the products on the conveyor belt, packaging, palletizing and preforming the cardboard boxes). There was variability in the screen-printed products (bottles or jugs). For this article, we will present the results only for the jugs and only for the four workstations beyond the oven exit (Figure 2).
Figure 2
Layout of the Four Workstations beyond the Oven Exit

The work involved taking products from the oven to a conveyor belt. The operators (#1 and #2) at the “visual inspection” workstation would pick up the jugs, check them and place them on a conveyor belt that led to the packaging workstation (operator #3). At that workstation, the operator would pack the jugs in a cardboard box and then send the box to the next workstation to be palletized (operators #4 and #5). Here, the boxes would be taped up and put onto the pallet. The pallet-loading station was also used to preform the cardboard boxes. The work was repetitive, loads had to be carried, the stations were dependent on each other and there were few areas for buffer stock. Moreover, the work required high cognitive effort to check for the presence of product defects, sometimes a millimetre in size. The operators signed a consent form to show that they had agreed to participate in the study and another consent form for image production rights. We took videos of the three successive workstations beyond the oven door for a total of 24 min 17s.
One goal of the observations was to identify very precisely the various actions by the operators at each workstation (type of action, movements, sequence...) in order to provide the computer specialists with sufficient information to start work on the movement programming of the future cobot.
4.3 Assessment by Experts
To assess the MSD factors at each of the workstations under observation, we used the APACT grid (1991), which assesses working conditions and work organization on the basis of 22 criteria (Bernard et al., 2017). This grid is based on traditional tools, such as RULA and REBA, to which have been added criteria on cognitive workload and organizational factors. It can be used to measure four risk factors: biomechanical; psychosocial; organizational; and environmental (Jafflin & Nadeau, 2020). We retained 14 criteria that were the most relevant to the aim of the study and the most conducive to video assessment (Table 1). Four experts viewed the videos to assess the workstations, using the criteria. Two of them assessed the real work processes, and the other two assessed the videos (during the COVID-19 lockdown). Traditionally, MSD risk has been assessed by a single expert (St Vincent et al., 2001). We used several experts to increase reliability (LeBreton & Senter, 2008; Tinsley & Weiss, 1975). Each criterion received a score between 0 and 10.5 from each expert.[2] The assessments were then pooled, and agreement on the criterion score was reached.
4.4 Self-Confrontation Interviews and Assessment of MSD Risk Factors by the Operators
4.4.1 Participants
The sample consisted of 6 operators (3 from the morning shift and 3 from the afternoon one)[3] who worked at the reception workstation of the production line, where screen-printed glass jugs were coming out of the oven. There were 2 men and 4 women, whose average age was M = 45.8 years and whose average seniority was 1 year and 9 months (M = 1.75). Two of the six operators worked for an adapted company (a business designed for disabled workers).[4] The researchers were not told about the workers’ disabilities, which did not impede communication or understanding. To ensure we were clearly understood, we asked the operators’ monitor (an employee support position) to explain the interview procedure to them.
4.4.2 Procedure
The self-confrontation interviews lasted 2 hours and 43 minutes for an average of 32 minutes each. In a simple self-confrontation interview, an employee would be confronted with the video of his/her activity and asked to comment on it (Boubée, 2010; Clot et al., 2000). The operators were shown short sequences of their activities,[5] asked questions and prompted throughout the viewing. The interviews were filmed. We carried out self-confrontation interviews primarily to validate the work processes at each workstation (e.g., a fine and detailed description of all the stages and all the stage sequences) and secondarily to understand some aspects of the activity (e.g., a glance toward a co-worker, a momentary stop, the buffer stock). By analyzing the videos and the work processes, we hoped to achieve a "participant/researcher co-analysis" (Boubée, 2010, p. 3). To assess subjective difficulty, we asked the operators to rate 14 criteria based on physical, organizational and psychosocial factors on a 10-point Likert scale derived from the APACT grid (Table 1). To understand what gave meaning to them in their tasks, and to investigate a possible division of tasks between human and cobot, we asked four questions: “If you had the possibility tomorrow of dropping one of these tasks, which one would it be? Conversely, which one would you prefer to keep? Imagine that you were offered a chance to have a cobot at the xxx workstation, which task would you wish it to do? Which task would you wish to keep for yourself?”
Table 1
Difficulty Level Criteria - Experts and Operators

5. Results
5.1 Assessment of MSD Risk Factors by the Experts
First, we identified the work processes by dividing the operator’s task into action units (Theureau, 2004).
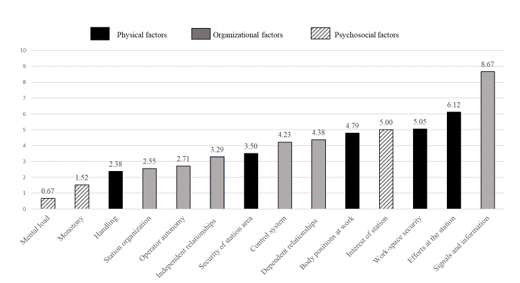
According to the experts, the work situations had MSD risks. Their assessment shows that 13 factors out of 14 were below the “correct” score of 6.5, as defined by the APACT grid (Figure 3). The three “bad” factors included two psychosocial ones (mental workload and monotony) and a physical one (handling). Five organizational factors were rated “insufficient” (i.e., workstation organization, operator autonomy, dependent and independent relationships, control system), as was one physical factor (i.e., workstation area safety). In addition, three physical factors (i.e., body position at work, work space safety, efforts at the workstation) and one psychosocial factor (i.e., interest in the workstation) were rated “average.” Only the signs and information criteria were rated “very good.”
Figure 3
Average Ratings of MSD Risk Factors by the Experts (Criteria on X Axis and Ratings on Y Axis)
Although the experts agreed that the work situations were characterized by several MSD risk factors, we asked the operators to perform their own assessment.
5.2 Ratings of MSD Risk Factors: Comparing the Operators and the Experts
The self-confrontation interviews began with a discussion with the operators about the different work processes. Then we analyzed their perceptions of the 14 risk factors, asking them to choose the three that they considered to be the most difficult in their job. We gave 3 points to the first one they mentioned, 2 to the second and 1 to the third. In general, the operators rated only 4 criteria “below average” on the Likert scale (Figure 4). The four risk factors judged to be the hardest were a psychosocial one (i.e., pace of work) and three physical ones (i.e., body position at work, work atmosphere and repetitive movements).
Figure 4
Average Ratings of MSD Risk Factors by the Operators (Criteria on X Axis and Ratings on Y Axis)

Most of the highest-rated risk factors were psychosocial and physical (Table 1). The operators considered the pace of work to be the hardest one, and the experts similarly considered mental workload and monotony to be the two hardest ones.
The operators also reported that the body positions for the tasks were painful. That risk factor partly overlapped with what the experts considered to be the third hardest risk factor: “handling” (which takes the most difficult body positions into account). Nonetheless, the experts considered “body position at work” to be only the tenth hardest criterion, with a rating of 4.79. The operators rated the work atmosphere as being the third hardest risk factor, which corresponded to “workstation area safety” for the experts, who rated it seventh hardest. This risk factor had an average rating of 3.5 on the APACT grid. It was therefore rated “bad” and in need of improvement.
We then analyzed the interviews in terms of all three risk factors: physical; organizational; and psychosocial:
Physical MSD risks: In their experience and opinion, the operators were fairly homogeneous in assessing the body positions and the pace of work, which they considered to be difficult: “It's true that it's physical: you have to bend down.” “Conditioning hurts the shoulders. You have to go and get the cardboard at the bottom, and then it's very energetic too. You have to be energetic to do it. It's quite intense work in general. It goes quite fast.” “The height of the posts is very painful. After two hours your back hurts.”
Several operators mentioned pallet changing as being difficult, especially when the operators were alone.
Some results were surprising. The operators did not share the same perception of the repetitiveness of their movements: “For me, not at all painful. If it is to repeat the same actions, the same movements… That's all we do anyway...”
For some operators, this was one of the most difficult aspects of the work, while for others it was not at all difficult.
Finally, the physical work environment (e.g., noise, heat) and the handling were perceived overall negatively, and the means of protection against occupational hazards were perceived overall as adequate.
Organizational MSD risks: 7 operators positively perceived the schedules, the organization of their workstations and the dependence of their workstations on each other. This dependence nonetheless required a great deal of coordination between the operators: "Depending on the person, whether he or she goes fast or not, we are not all equal in this respect. There are some who stockpile. There are others who do not stockpile. There are some who send much faster than others. The aim is to coordinate with the person who sends because afterwards we are quickly overwhelmed."
In addition, most of the operators mentioned mutual aid as an integral part of their work: "It's a team job, so normally we have to help each other. If there's something wrong or if the co-worker is having trouble, that's it, we have to help each other. [...]" "Yes, I look to see if my co-worker has too much. I check to be able to stockpile if he doesn't make it. "I look at my co-worker. I have to watch over the packaging because my co-worker also has to keep up. We also have to look after our co-workers.”
Psychosocial risks: Most of the operators positively perceived the responsibilities, the decision making and the relationships with their co-workers and with the chain of command. They differed, however, in their perceptions of visual inspection. Although both of the operators in charge of visual inspection described it as their main responsibility, one of them perceived it as very low in importance: "The responsibility is very low. Maybe because we check and that's it." In contrast, the other operator perceived it as important: "The responsibility is mostly [one of] inspection. Let’s say I give [it] a grade of 6. There is an inspection, and it has to be checked. It's important."
In the same way, two operators in the same position had totally different perceptions of the level of attention they needed to do the work: "Not at all difficult. I don't need to be concentrated." "For me I need to be concentrated. I shouldn't be disturbed. I should be concentrated normally."
Consequently, the experts and the operators were both similar and different in their perceptions of MSD risk factors. This point will be further discussed in section 6. Moreover, the operators seemed to rate only a few of the risk factors negatively. They also differed in their perception of the drudgery of their work, thus raising the issue of its meaningfulness to them. This factor could influence their subjective experience of the degree of difficulty.
5.3 Meaning of Work: To Delegate or Not to Delegate to the Cobot
When the operators were asked which tasks they would like to delegate to the cobot, they gave three types of answer ( Figure 5). First, operators #2 and #4 would have the cobot do the physical workload (handling). They would in fact give it all of the handling, whether the product was being moved straight out of the oven or was at the pallet-loading station. As for operator #3, he wished to continue handling the jugs but have the cobot assist him, while not being clear about the kind of assistance. He wished to keep the handling so that he could continue looking at the jugs with a critical eye when putting them into the cardboard boxes. It was thus the quality of the work and the visual inspection that made him want to keep that task. The other two operators (#1 and #5) wished to delegate the mental workload (visual inspection) to the cobot. Both of them worked for an adapted company and did not perceive the repetition of movement as a source of difficulty. The first operator (#5) expanded on the difficulty of maintaining his concentration for this task over a whole day “If it’s about putting the jugs in the box, it becomes automatic, and [there’s] no need to think. We’re in automated mode.” The second operator (#1) explained that he had trouble making decisions and taking responsibilities (these two tasks were the ones he perceived as being the hardest in his job). He did not consider the repetitiveness of his actions to be hard: “for me, not hard at all. If it means repeating the same movements, the same gestures, well, no problem at all for me. Repeated movements, doing the same job, it doesn’t bother me.”
Figure 5
Division of Tasks between the Future Cobot and the Operators

Of the five operators interviewed, three said they enjoyed working at the packaging workstation and would like to stay there. Yet it was a workstation where the operators could not let the stock pile up if the pace got too fast. Only the person before them (at the oven) could stockpile on a side pallet to manage the flow of jugs. Moreover, most of the operators said that mutual assistance was indispensable to getting the work done properly because the different workstations were largely dependent on each other (Figure 6). The pace of work at one station would determine the pace of work at the next.
Figure 6
Excerpts from Operator Interviews

The results show that the operators did not necessarily wish to give a cobot the physically hardest tasks. For some operators, the mental workload of the visual inspection was more demanding and difficult than the handling of the jugs.
6. Discussion
6.1 Assessment of MSD Risk Factors
For both the experts and the operators, the leading MSD risk factors were either psychosocial or physical. As specified by Jaffar and colleagues (2011), the physical risk factors are the most important contributors to MSDs. The experts differed from the operators on some points, perhaps partly because not all of them did their ratings on-site. Nevertheless, the operators offered a subjective viewpoint that seems important in and of itself (Lasfargues et al., 2005). Although outside experts can definitely assess work situations and come to conclusions, they do not necessarily identify the ones that workers experience as being the most demanding physically or psychosocially.
The operators themselves had very different perceptions of MSD risk factors, especially when rating repetitive movements. Hélardot (2008) explained “that there is no job or task that is intrinsically or absolutely hard, but the arduousness is always relative to the individual who has had the experience of it: it is predicated on the state of his health, his past, his personal norms and values” (p. 7). Working conditions, and their accompanying difficulties, are a subjective experience and, as such, reflected in the meaning the operators give to their work.
6.2 Meaning of Work and Repetitiveness of Tasks
Some operators did not want to delegate the handling of jugs to the cobot, preferring to give it either the mental workload or the visual inspection. These results can be explained by Isaksen’s research (2000), which shows that meaning may be found in repetitive work. By including a subjective rating of MSD risk factors, we can ask questions about the operators' preferences, in particular what it is about their work that enables them to maintain their health despite the drudgery (Bakker & Demerouti, 2017, 2018). Activity is not only about exposure to risk factors but also about finding ways to achieve the goals of a task while maintaining opportunities for action. These "resources" must be studied during cobot introduction so as not to deprive work of its meaning. They can be perceived and identified only by the operators. To our knowledge, there is no grid that an external observer can use to quantify and qualify such resources. This probably explains not only the rating differences between the operators and the experts but also the rating differences among the operators. Indeed, resources may or may not be identifiable to employees. In a developmental approach to design, it is thus necessary to consider how the employees view their work and its perceived drudgery.
There are broader issues at stake here than prevention of occupational hazards. There are also many human resource issues: skills development; career path support; and organizational determinants of employee health.
It is important to note that the two operators who wished to keep the handling tasks were employed by an adapted company. There has been little research on occupational hazard assessment by workers with special cognitive needs (Groizeleau et al., 2019; Guyon Taillens et al., 2020). They may not attach the same meaning to work. Guyon Taillens and colleagues (2020) explain the difficulties in assessing psychosocial risk with workers who have special needs. They may perceive some factors like autonomy—normally an advantage at work—as a threat and a source of risk.
Bobillier Chaumon and colleagues (2019) argue that to gain acceptance for emerging technologies, such as collaborative robots, one must show their usefulness and ease of implementation for an activity. Thus, as part of the activity, emerging technologies would not only give meaning to the operators “but also give (again) meaning to the activity: by maintaining the workers’ power to act, by developing their skills, by recognizing their know-how, by increasing initiative and autonomy and by giving a new dynamic to the job” (p. 21). Thus, when designing the tasks and dividing them between the cobot and the operator, one should consider not only the different perceived difficulties of the tasks but also the resources that the work situation offers. Because different workers may have different views, one should prevent future problems by distributing the tasks through a collective and participatory approach, without omitting the pragmatic realities of programming the cobot.
6.3 Cobot-Operator Collaboration
During the interviews, the operators said that mutual assistance was central to their work. Because they worked on a production line, the workstations were by definition very dependent on each other. This system of mutual assistance could be disrupted by cobots (Dubreuil-Nayrac et al., 2019). Bobillier Chaumon et al. (2019) report that with the new forms of interaction inherent to these emerging technologies “new forms of man-robot cooperation and interfaces are to be imagined and developed” (p. 17). Moreover, the cobot has to understand and adapt to the worker’s intentions (Devy, 2012). The question here is to know how a cobot can understand and anticipate the intentions of a worker who is regulating the work flow for the sake of a co-worker at the next workstation down the line (Ferreira Duarte et al., 2018).
To design a cobot that can reduce the drudgery of work, it is important to consider two points:
First, the objective drudgery is not always the experienced drudgery. The operators do not always wish to delegate the worst tasks to a cobot.
Second, there is variability among individual operators. This point must be taken into account when a cobot is brought into a production line.
Our research shows the differences in the way a task may be perceived within the same group of workers. Such differences will affect constraints and resources. Because of this study, we began collaborating with programmers to design algorithms that allow for variability not only among individuals but also among technologies and among organizations. This is how artificial intelligence should be adapted to the real world of work if it is to develop. For now, it is still too rigid and little used in industry.
6.4 Study Limitations
Like any study, this one has a certain number of limitations. First, the number of participants was limited. On the other hand, all the operators were specialized in work on the same production line, and the company's workforce was not large. Second, some bias may have been present in one way or another during data collection, during the observation stage (e.g., selection effect, observer bias) and during the self-confrontation interviews (e.g., social desirability bias). The experts would have been more comparable with each other in their ratings if they had all done the ratings on-site, rather than by video, as was the case with half of them (e.g., principle of compatibility).
7. Contribution and Conclusion
We were able to explore our initial analyses with the company CEO and with the team of computer engineers in charge of cobot programming. We are now left with two key questions.
First, what role “must” the cobot have in the work situation? Indeed, the “new co-worker” must not deprive the operators of the meaning they give to their work by taking on all the tasks that may make the operator’s job meaningful, be they quality ones or hard ones.
Second, how will the cobot be integrated into the operators’ system of mutual assistance? It will also have to anticipate and adapt itself to the production-line operator it is there to assist. It should help not hinder.
The introduction of a cobot can raise real Quality of Life at Work (QLW) issues. Simultaneous human-robot collaboration calls into question the distribution of tasks, the focus of the work activity and the perceived drudgery. Such technological change must be assisted by HR managers, work psychologists or ergonomists. Introduction of a collaborative robot may also require training courses to teach the workers new skills and to help them rethink their career paths. Technological change alone should not be seen as the cure for all work-related ills.
We adopted a participatory approach of asking the operators to assess the MSD risk factors, and this approach may be used by all kinds of employees, including people with or without special needs. Different employees may differ, however, in the way they perceive the meaning of work, and this reality must be understood and integrated into any new technology, like the cobot, not only by the company directors but also by those who design the new technology (Bachellerie et al., 2022; Galey et al., 2022).
We wish therefore to pursue our research in three ways. First, we would like to develop a repository for data on employee variability before cobot introduction (Fournier et al., 2023) and a method for integrating the meaning of work into the design of human-robot collaboration. Second, it is important to develop and validate a grid for subjective assessment by workers of MSD risk factors. Third, we wish to develop a cobot acceptability questionnaire for manufacturers to investigate cobot-related perceptions, beliefs and attitudes (Cippelletti et al., 2023) in order to gain insight not only into those factors that may hinder the introduction of cobots but also into those that may help integrate them into the production process.
Disclosure statement
No potential conflict of interest was reported by the author(s).
Parties annexes
Acknowledgements
The authors would like to thank the company for participating in this study, as well as the employees who agreed to be observed and interviewed.
Notes
-
[1]
Job autonomy means being able to take initiative and thus take charge of a complex work situation, which is not totally subject to rules, and being able to self-organize (look for the best way of doing things to achieve a set objective) (Everaere, 2019). There are three types: procedural autonomy; planning autonomy; and criterion autonomy (Azouaghe, 2019; Breaugh, 1999).
-
[2]
The APACT grid has the following score ranges: 0 to 2.5: Bad; 2.5 to 4.5 Insufficient; 4.5 to 6.5: Medium; 6.5 to 8.5: Good; 8.5 to 10.5: Very good.
-
[3]
One of the operators filmed during the first stage was not at work during the interviews. This person was excluded from calculations of the average age and seniority of the company operators.
-
[4]
“Adapted companies contribute to the development of territories and promote an inclusive economic environment favourable to disabled men and women” (Légifrance, 2020).
-
[5]
The videos shown to the operators were the same as those used by the experts to assess MSD risk factors.
-
[6]
Workplace body positions: (standing, sitting) positions, height, change of level and bending; Effort at the workstation: position and frequency of efforts; Handling: postures and frequency of carrying loads; Workstation area safety: presence of occupational hazards (OHs); Work space safety: protection against OHs; Autonomy: dependence on other workstations; Dependent work relationships: type of work: (independent, dependent etc.); Independent work relationships: possibility of social relationships with others; Control system: command centre; Signs and information: layout of visual signs: Organization of the workstation: layout and circulation around the workstation; interest in the workstation: operator’s responsibility; Mental workload: density of the tasks and level of attention; Monotony: length of cycle, identical operation during a cycle.
References
- AMELI (2020) Définition et impact des TMS. https://www.ameli.fr/entreprise/sante-travail/risques/troubles-musculosquelettiques-tms/tms-definition-impact
- APACT (1991). Guide d'évaluation des conditions et organisations du travail. Paris: Association de la prévention des Conditions de Travail.
- Azouaghe, Soufian. (2019). Santé psychologique au travail dans le milieu scolaire public : étude des déterminants organisationnels et psychologiques chez les enseignants marocains (Doctoral dissertation, Université Grenoble Alpes). https://theses.hal.science/tel-02371977v1
- Bachellerie, Camille, Gaudart, Corinne, & Petit, Johan. (2022). L’analyse des usages de technologies digitales dédiées à la synchronisation : intérêts pour l’étude d’une transformation organisationnelle dans l’ingénierie de conception automobile. Relations industrielles / Industrial Relations, 77(3). https://doi.org/10.7202/1094213ar
- Bakker, Arnold B., & Demerouti, Evangelia (2017). Job Demands–Resources Theory: Taking Stock and Looking Forward. Journal of Occupational Health Psychology, 22, 273-285. doi: 10.1037/ocp0000056.
- Bakker, Arnold B., & Demerouti, Evangelia (2018). Multiple levels in job demands-resources theory: Implications for employee well-being and performance. In: E. Diener, S. Oishi, & L. Tay (Ed.), Handbook of well-being. Salt Lake City, UT: DEF Publishers. doi: nobascholar.com.
- Bao, Stephen S., Kapellusch, Jay M., Merryweather, Andrew S., Thiese, Matthew S., Garg, Arun, Hegmann, Kurt T., & Silverstein, Barbara A. (2015). Relationships between job organizational factors, biomechanical and psychosocial exposures, Ergonomics, 59(2), 179-193, https://doi.org/10.1080/00140139.2015.1065347.
- Barrett, Jackie H., Haslam, Roger A., Lee, Katherine G., & Ellis, Mike J. (2005). Assessing attitudes and beliefs using the stage of change paradigm—case study of health and safety appraisal within a manufacturing company. International Journal of Industrial Ergonomics, 35, 871-887. https://doi.org/10.1016/j.ergon.2004.12.004.
- Bellemare, Marie, Caroly, Sandrine, & Prud’homme, Daniel (2019). Travail collectif pluridisciplinaire dans la prévention des risques professionnels complexes: ressources et contraintes du contexte au Québec et en France. Relations industrielles/Industrial Relations, 74(2), 242-265.
- Bernard, Bruce (Ed. 1997). Musculoskeletal Disorders and Workplace Factors: A critical review of epidemiologic evidence for work-related musculoskeletal disorders of the neck, upper extremity, and low back. https://www.cdc.gov/niosh/docs/97-141/pdfs/97-141.pdf?id=10.26616/NIOSHPUB97141.
- Bernard, Fabien , Sagot, Jean-Claude, & Paquin, Raphael (2017). Simulation de l'activité de maintenance pour une meilleure intégration du facteur humain en maintenabilité. Papier presented at: 24éme colloque des Sciences de la conception et de l'innovation, CONFERE 2017, Seville, Spain.
- Bobillier Chaumon, Marc-Éric, Barville, Nadia, & Crouzat, Pascal (2019). Les technologies émergentes au travail. Le Journal Des Psychologues, n°367(5), 16–21. https://doi.org/10.3917/jdp.367.0016.
- Bobillier Chaumon, Marc-Éric (2021). Technologies émergentes et transformations digitales de l’activité : Enjeux pour l’activité et la santé au travail. Psychologie du Travail et des Organisations, 27(1), 17‑32. https://doi.org/10.1016/j.pto.2021.01.002
- Bobillier Chaumon, Marc-Eric, Delgoulet, Catherine, Greenan, Nathalie, Lemonie, Yannick, & Warhurst, Chris (2022). Éprouver la dualité des technologies digitales en croisant les regards disciplinaires / Cross-disciplinary perspectives on the duality of digital technologies. Relations industrielles / Industrial Relations, 77(3). https://doi.org/10.7202/1094207ar
- Boubée, Nicole (2010). La méthode de l’autoconfrontation: une méthode bien adaptée à l’investigation de l’activité de recherche d’information ?. Études de communication, 35, 47-60.
- Bourgeois, Fabrice, Lemarchand, Claude, Hubault, François, Brun, Catherine, Polin, Alexis, & Faucheux Jean-Marie (2000). TMS et travail, quand la santé interroge l’organisation. Lyon: Editions de l’ANACT.
- Breaugh, James A. (1999). Further Investigation of the Work Autonomy Scales: Two Studies. Journal of Business and Psychology, 13, 357-373. doi: 10.1023/A:1022926416628.
- Buchmann, Willy, & Landry, Aurélie (2010) Intervenir sur les TMS : Un modèle des Troubles Musculosquelettiques comme objet intermédiaire entre ergonomes et acteurs de l’entreprise ?. Activités, 7(2), 84-103.
- Buckle, Peter, & Devereux, Jason (2002). The nature of work-related neck and upper limbmusculoskeletal disorders. Applied Ergonomics, 33, 207-217. https://doi.org/10.1016/S0003-6870(02)00014-5.
- Cardoso, André, Colim, Ana, Bicho, Estela, Braga, Ana Cristina, Menozzi, Marino, & Arezes, Pedro (2021). Ergonomics and Human Factors as a Requirement to Implement Safer Collaborative Robotic Workstations: A Literature Review. Safety, 7(4), 71. MDPI AG. Retrieved from http://dx.doi.org/10.3390/safety7040071
- Caroly, Sandrine, Coutarel, Fabien, Escriva, Evelyne, Roquelaure, Yves, Schweitzer Jean-Marieu, & Daniellou, François (2008). La prévention durable des TMS : Quels freins ? Quels leviers d’action ? https://halshs.archives-ouvertes.fr/halshs-00373778/document.
- Caroly, Sandrine, Coutarel, Fabien, Landry, Aurélie, & Mary-Cheray, Isabelle (2010). Comparison of production management for continuous improvement and the OHS management system for safety and health of workers in assembly lines sector. Applied Ergonomics 41 (2010) 591–599.
- Caroly, Sandrine, Hubaut, Rémi, Guelle, Kévin, & Landry, Aurélie (2019). Le travail digital, un enjeu pour les psychologues du travail. Le Journal des psychologues, (5), 27-32.
- CEA (French Alternative Energies and Atomic Energy Commission). (2015). Les robots s’intègrent dans l’usine du futur.Dossier de presse. http://www.cea.fr/presse/Documents/DP/2015/dossier-presse-usine-du-futur-et-robot
- Chahir, Mehdi, Bordel, Stéphanie, & Somat, Alain (2022). Accompagner le déploiement d’une nouvelle technologie par la prise en compte des risques et des opportunités. Relations industrielles / Industrial Relations, 77(3). https://doi.org/10.7202/1094208ar
- Cippelletti, Emma, Fournier, Etienne, & Landry, Aurélie (2023, July 17-21). Acceptabilité des robots collaboratifs (Cobot) par des travailleurs français. In: A. Landry (ed.), Rendre les technologies émergentes favorables à l’activité : expériences d’accompagnement de la cobotique industrielle [Symposium]. 22e congrès de l’Association Internationale de Psychologie du Travail de Langue Française (AIPTLF), Montréal, Québec.
- Claverie, Bernard, Le Blanc, Benoît & Fouillat, Pascal (2013). La cobotique. Communication et Organisation, 44, 203–214. https://doi.org/10.4000/communicationorganisation.4425.
- Clot, Yves, Faïta, Daniel, Fernandez, Gabriel, & Scheller, Lisa (2000). Entretiens en autoconfrontation croisée : une méthode en clinique de l’activité. Perspectives interdisciplinaires sur le travail et la santé, (2-1). https://doi.org/10.4000/pistes.3833.
- Colgate, J. Edward, Wannasuphoprasit, Witaya, & Peshkin, Michael A. (1996). Cobots robots for collaboration with human operator. Proceedings of the ASME Dynamic Systems and Control Division, 58, 433-440.
- Colim, Ana, Faria, Carlos, Braga, Ana Cristina, Sousa, Nuno, Carneiro, Paula, Costa, Nélson, & Arezes, Pedro (2020). Towards an Ergonomic Assessment Framework for Industrial Assembly Workstations - A Case Study in Applied Science, 10, 3048
- Colim, Ana, Cardoso, André, Arezes, Pedro, Braga, Ana Cristina, Peixoto, Ana Carolina, Peixoto, Vitor, Wolbert, Felix, Carneiro, Paula, Costa, Nélson, & Sousa, Nuno (2021). Digitalization of Musculoskeletal Risk Assessment in a Robotic-Assisted Assembly Workstation. Safety, 7(4), Article 4. https://doi.org/10.3390/safety7040074
- Colim, Ana, Faria, Carlos, Cunha, Joao, Oliveira, Joao, Sousa, Nuno, & Rocha, Luis A. (2021). Physical Ergonomic Improvement and Safe Design of an Assembly Workstation through Collaborative Robotics. Safety, 7(1), Article 1. https://doi.org/10.3390/safety7010014
- Coutarel Fabien, & Daniellou François (2011) L’intervention ergonomique pour la prévention des troubles musculosquelettiques : quels statuts pour l’expérience et la subjectivité des travailleurs ? Travail Apprentissage, 7(1), 62‑80.
- David, G.C. (2005). Ergonomic Methods for Assessing Exposure to Risk Factors for Work-Related Musculoskeletal Disorders. Occupational Medicine, 55, 190–199.
- Devy, Michel (2012). La cobotique : des robots industriels aux robots assistants, coopérants et co-opérateurs. Annales des Mines-Réalités industrielles (No. 1, pp. 76-85). Eska. https://doi.org/10.3917/rindu.121.0076.
- Dimitropoulos, Nikos, Togias, Theodoros, Zacharaki, Natalia, Michalos, George, & Makris, Sotiris (2021). Seamless human–robot collaborative assembly using artificial intelligence and wearable devices. Applied Sciences, 11, 56-99.
- Dubreuil-Nayrac, Isabelle, Caillat, Claire, Massu, Justine, Boisson, Jean-François, & Werlen, Martin (2019). Accompagner les transformations des organisations. Le Journal des psychologues, (5), 33-37. https://doi.org/10.3917/jdp.367.0033.
- EU-OSHA, (2019). Work-related musculoskeletal disorders: prevalence, costs and demographics in the EU. https://osha.europa.eu/en/publications/summary-msds-facts-and-figures-overview-prevalence-costs-and-demographics-msds-europe/view.
- EUROGIP, (2017). Prévention dans le domaine de la robotique collaborative. Synthèse de travaux réalisés à l'international. https://www.eurogip.fr/images/pdf/Prevention%20robotique%20collaborative%20a%20linternational-Eurogip129F.pdf.
- Everaere, Christophe (2019). Autonomie. In: Gérard Valléry (ed.), Psychologie du Travail et des Organisations : 110 notions clés (pp. 67-70). Paris: Dunod. https://doi10.3917/dunod.valle.2019.01.0067
- Ferreira Duarte, Nuno, Raković, Mirko, Tasevski, Jovica, Coco, Moreno, Billard, Aude, & Santos-Victor, José (2018). Action anticipation: Reading the intentions of humans and robots. IEEE Robotics and Automation Letters, 3(4), 4132-4139.
- Fjell, Ylva, Alexanderson, Kristina, Karlqvist, Lena, & Bildt, Carina, (2007). Self-reported musculoskeletal pain and working conditions among employees in the Swedish public sector. Work, (28)33-46.
- Forde, Martin S., Punnett, Laura, & Wegman, David H. (2002). Pathomechanisms of workrelated musculoskeletal disorders: Conceptual issues. Ergonomics, 45(9), 619–630. https://doi.org/10.1080/00140130210153487.
- Fournier, Etienne, Nstame Sima, Murielle, Jeoffrion, Christine, & Landry, Aurélie (2023, July 17-21). Comprendre les variabilités en situation de travail avant l'implémentation d'un robot collaboratif (Cobot) In: A. Landry : Rendre les technologies émergentes favorables à l’activité : expériences d’accompagnement de la cobotique industrielle [Symposium]. 22e congrès de l’Association Internationale de Psychologie du Travail de Langue Française (AIPTLF), Montréal, Québec.
- Galey, Louis, Terquem, Valérie, & Barcellini, Flore (2022). A Social Design Approach: Enhancement of Local Social Dialogue on the Transformation of Work by Digital Technology. Relations industrielles / Industrial Relations, 77(3). https://doi.org/10.7202/1094211ar
- Gallagher, Sean, & Schall Mark C. Jr. (2017). Musculoskeletal disorders as a fatigue failure process: evidence, implications, and research needs. Ergonomics, 60(2), 255-269. https://doi.org/10.1080/00140139.2016.1208848.
- Grenier-Pezé, Marie (2003). Corps et travail, Cahiers du Genre, 35 (2),141-164.
- Groizeleau, Alain, Passerault, Jean-Michel, & Esnard, Catherine (2019). Méthode d’évaluation des risques psychosociaux auprès de travailleurs déficients intellectuels. Psychologie du Travail et des Organisations, 25(3), 141-151. https://doi.org/10.1016/j.pto.2019.03.001.
- Guérin François, Pueyo Valérie, Béguin Pascal, Garrigou Alain, Hubault François, Maline Jean, & Morlet Thierry (2021). Concevoir le travail, le défi de l’ergonomie. Toulouse : Éditions Octares.
- Guyon Taillens, Camille, Labrell, Florence, & Demulier, Virginie (2020). L’analyse des risques psychosociaux en ESAT parmi des travailleurs en situation de handicap (TSH): éléments de réflexion. Psychologie du Travail et des Organisations, 26(3), 239‑246. https://doi.org/10.1016/j.pto.2020.07.001
- France's Institute for Research and Security. (2014). Faits et chiffres en 2014. http://www.inrs.fr/dms/inrs/CataloguePapier/ED/TI-ED-4458/ed4458.pdf.
- France's Institute for Research and Security. (2015). Troubles musculo-squelettiques : Facteurs de risque. http://www.inrs.fr/risques/tms-troubles-musculosquelettiques/facteurs-risque.html.
- Haslam, Roger (2002). Targeting ergonomics interventions—learning from health promotion. Applied Ergonomics, 33, 241-249. https://doi.org/10.1016/S0003-6870(02)00016-9.
- Hélardot, Valentine (2008). Pour une approche élargie de la pénibilité du travail. Journal des professionnels de la santé au travail, 4, 8-9.
- Isaksen, Jesper (2000). Constructing meaning despite the drudgery of repetitive work. Journal of humanistic Psychology, 40(3), 84-107. https://doi.org/10.1177/0022167800403008.
- Jaffar, Nooraidawati, Abdul-Tharim, Asniza Hamimi Abdul Mohd-Kamar, Izatul Farrita & Lop, Nor Suzila (2011). A literature review of ergonomics risk factors in construction industry. Procedia Engineering, 20, 89-97.
- Jafflin, Aurélie, & Nadeau, Sylvie (2020). Identifying OHS hazards in university research laboratories from an ergonomics and human factors perspective. Paper presented at the 66th Gfa-frühjahrs Kongress, Berlin, Germany.
- Jansen, Anne, Beek, Dolf Van Der, Cremers, Anita, Neerincx, Mark, & Middelaar, Johan Van (2018). Emergent risks to workplace safety; working in the same space as a cobot. https://publications.tno.nl/publication/34627026/je8DYe/TNO-2018-R10742.pdf.
- Kagermann, Henning, Helbig, Johannes, Hellinger, Ariane, & Wahlster, Wolfgang (2013). Recommendations for implementing the strategic initiative INDUSTRIE 4.0: Securing the future of German manufacturing industry; final report of the Industrie 4.0 Working Group. Forschungsunion. https://en.acatech.de/publication/recommendations-for-implementing-the-strategic-initiative-industrie-4-0-final-report-of-the-industrie-4-0-working-group/.
- Karsh, Ben Tzion, Moro, Franscico B.P., & Smith, Michael J. (2001). The efficacy of workplace ergonomic interventions to control musculoskeletal disorders: a critical analysis of the peer-reviewed literature. Theoretical Issues in Ergonomics Science, 2 (1), 23–96. https://doi.org/10.1080/14639220152644533.
- Kim, Wansoo, Peternel, Luka, Lorenzini, Marta, Babič, Jan, & Ajoudani, Arash (2021) A Human-Robot Collaboration Framework for Improving Ergonomics During Dexterous Operation of Power Tools. Robotics and Computer-Integrated Manufacturing, 68.
- Kuorinka, Likka, & Forcier, Lina (1995). Work related musculoskeletal disorders (WMSDs): A reference book for prevention. London: Taylor and Francis.
- Landry, Aurélie (2012) Suggested Evaluation Approach for Training in Ergonomics, Work: A Journal of Prevention Assessment, and Rehabilitation. 41 (2), 177-186. doi: 10.3233/WOR-2012-1282
- Lanfranchi, Jean-Baptiste, & Duveau, Aurélie (2008). Explicative models of musculoskeletal disorders (MSD): From biomechanical and psychosocial factors to clinical analysis of ergonomics. European Review of Applied Psychology, 58(4), 201‑213. https://doi.org/10.1016/j.erap.2008.09.004
- Lasfargues, Gérard, Molinie, Anne-Françoise, & Volkoff, Serge (2005). Départs en retraite et « travaux pénibles ». L’usage des connaissances scientifiques sur le travail et ses risques à long terme pour la santé, Rapport de recherches, (19), 39.
- LeBreton, J. M., & Senter, J. L. (2008). Answers to 20 Questions about Interrater Reliability and Interrater Agreement. Organizational Research Methods, 11, 815-852. http://dx.doi.org/10.1177/1094428106296642
- Leclerc, Annette, Chastang, Jean-François, Pascal, P., Plouvier, Sandrine, & Mediouni, Zakia (2015). Conséquences des troubles musculosquelettiques sur l’itinéraire professionnel, résultats d’une enquête nationale. Archives des Maladies Professionnelles et de l'Environnement, 76(3, 245-54. https://doi.org/10.1016/j.admp.2014.10.009.
- Légifrance (2020). Article L5213-13 du code du travail : Sous-section 3 : Entreprises adaptées et centres de distribution de travail à domicile. https://www.legifrance.gouv.fr/affichCode.do?idSectionTA=LEGISCTA000006195890&cidTexte=LEGITEXT000006072050.
- Leplat, Jean (1989). Error analysis, instrument and object of task analysis. Ergonomics, 32(7), 813-822.
- Levanon, Yafa, Gefen, Amit, Lerman, Yehuda, Givon, Uri, & Ratzon, Navah Z. (2012). Reducing musculoskeletal disorders among computer operators: Comparison between ergonomics interventions at the workplace. Ergonomics, 55 (12), 1571-85. https://doi.org/10.1080/00140139.2012.726654.
- Lorenzini, Marta, Kim, Wansu, Momi, Elena de, & Ajoudani, Arash (2019). A New Overloading Fatigue Model for Ergonomic Risk Assessment with Application to Human-Robot Collaboration. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 1962–1968.
- Lu, Yang (2017). Industry 4.0: A survey on technologies, applications and open research issues. Journal of Industrial Information Integration, 6, 1-10. https://doi.org/10.1016/j.jii.2017.04.005.
- Morin, Estelle (2008). Sens du travail, santé mentale au travail et engagement organisationnel. Cahier de recherche, 543, 99-193.
- Moulières-Seban, Théo, Bitonneau, David, Salotti Jean-Marc, Thibault, Jean-François, & Claverie, Bernard (2017). Human Factors Issues for the Design of a Cobotic System. In: P., Savage-Knepshield & J. Chen (Eds), Advances in Human Factors in Robots and Unmanned Systems. Advances in Intelligent Systems and Computing (375-385). Springer, Cham.
- MTEFPDS (Department of Employment, Social Affairs & Inclusion) (2015). Conditions de travail. Bilan 2015. https://travail-emploi.gouv.fr/IMG/pdf/bilan_des_conditions_de_travail_2015.pdf.
- National Research Council. (2001). Musculoskeletal Disorders and the Workplace. Washington, DC: National Academy Press.
- Nunes, Isabel (2009). FAST ERGO_X–a tool for ergonomic auditing and work-related musculoskeletal disorders prevention. Work, 34(2), 133-148.
- Nunes, Isabel., & McCauley-Bush, Pamela (2012). Work-related musculoskeletal disorders assessment and prevention. In: Nunes, I. L. (Ed.), Ergonomics-A Systems Approach, InTech (pp.1–30). http://www.intechopen.com/books/ergonomics-a-systemsapproach/work-related-musculoskeletal-disorders-assessment-and-prevention.
- Roquelaure, Yves (2018). Musculoskeletal disorders and psychosocial factors at work. ETUI Research Paper-Report, 142. https://www.etui.org/content/download/35699/355072/file/EN-Report-142-MSD-Roquelaure-WEB.pdf.
- Roquelaure, Yves, Bodin, Julie, Ha, Catherine, Petit Le Manac’h, Audrey, Descatha, Alexis, Leclerc, Annette, Goldberg, Marcel, Imbernon, Ellen (2011). Personal, biomechanical, and psychosocial risk factors for rotator cuff syndrome in a working population. Scandinavian Journal of Work and Environmental Health, 37(6), 502-511. Doi :10.5271/sjweh.3179.
- Sérazin, Céline, Ha, Catherine, Bodin, Julie, Imbernon, Ellen, & Roquelaure, Yves. (2013). Employment and occupational outcomes of workers with musculoskeletal pain in a French region. Occupational and Environmental Medicine, 70, 143-148. http://dx.doi.org/10.1136/oemed-2012-100685.
- Shafti, Ali, Ataka, Ahmad, Lazpita, Beatriz, Shiva, Ali, Wurdemann, Helge, & Althoefer, Kaspar (2019). Real-Time Robot-Assisted Ergonomics. In: Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 1975–1981.
- St Vincent, Marie, Lortie, Monique, & Chicoine, Denise (2001). Participatory Ergonomics Training in the Manufacturing Sector and Ergonomic Analysis Tools. Relations industrielles / Industrial Relations, 56(3), 491–515. https://doi.org/10.7202/000080ar
- St Vincent, Marie, Vézina, Nicole, Bellemare, Marie, Denys, Denis, Ledoux, Elise, & Imbeau, Daniel (2011). L’intervention en ergonomie. Québec : Éditions Multi-Mondes et Institut de recherche Robert-Sauvé en santé et sécurité du travail (IRSST), 2011, 360 p., ISBN : 978-2-89544-165-6.
- Thames, Lane, & Schaefer, Dirck (2016). Software-defined cloud manufacturing for Industry 4.0. Procedia CIRP, 52, 12-17. https://doi.org/10.1016/j.procir.2016.07.041
- Theureau, Jacques (2004). L’hypothèse de la cognition (ou action) située et la tradition d’analyse du travail de l’ergonomie de langue française. Activités, 01(2), Article 2. https://doi.org/10.4000/activites.1219
- Tinsley, Howard, & Weiss, David (1975). Interrater reliability and agreement of subjective judgments. Journal of Counseling Psychology, 22(4), 358–376. https://doi.org/10.1037/h0076640
- Trevelyan, F., & Haslam, Roger (2001). Musculoskeletal disorders in a handmade brick manufacturing plant. International Journal of Industrial Ergonomics, 27, 43-55. https://doi.org/10.1016/S0169-8141(00)00036-6.
- Vallery, Gérard, Bobillier Chaumon, Marc-Eric, Brangier, Eric, & Dubois, Michel (2019). Psychologie du Travail et des Organisations : 110 notions clés-2e éd. Dunod.
- Villani, Valeria, Pini, Fabio, Leali, Franscesco, & Secchi, Cristian (2018). Survey on human–robot collaboration in industrial settings : Safety, intuitive interfaces and applications. Mechatronics, 55, 248‑266. https://doi.org/10.1016/j.mechatronics.2018.02.009
- Whysall, Zara, Haslam, Roger, & Haslam, Cheryl (2004). Processes, barriers, and outcomes described by ergonomics consultants in preventing work-related musculoskeletal disorders. Applied Ergonomics, 35(4), 343-351. https://doi.org/10.1016/j.apergo.2004.03.001.
- Whysall, Zara, Haslam, Cheryl, & Haslam, Roger (2006). Implementing health and safety interventions in the workplace: An exploratory study. International Journal of Industrial Ergonomics, 36(9), 809-818. https://doi.org/10.1016/j.ergon.2006.06.007.
- World Health Organization (2003). Preventing musculoskeletal disorders in the workplace. Retrieved from https://apps.who.int/iris/bitstream/handle/10665/42651/924159053X.pdf?sequence=1.
- World Health Organization (2019). Musculoskeletal conditions. Retrieved from https://www.who.int/news-room/fact-sheets/detail/musculoskeletal-conditions.
- Xu, Yan-Wen, Cheng, Andy, & Li-Tsang, Cecilia (2013). Prevalence and risk factors of work-related musculoskeletal disorders in the catering industry: A systematic review. Work, 44(2), 107-116.
 10.7202/1094213ar
10.7202/1094213arListe des figures
Figure 1
Overall Procedure
Figure 2
Layout of the Four Workstations beyond the Oven Exit
Figure 3
Average Ratings of MSD Risk Factors by the Experts (Criteria on X Axis and Ratings on Y Axis)
Figure 4
Average Ratings of MSD Risk Factors by the Operators (Criteria on X Axis and Ratings on Y Axis)
Figure 5
Division of Tasks between the Future Cobot and the Operators
Figure 6
Excerpts from Operator Interviews
Liste des tableaux
Table 1
Difficulty Level Criteria - Experts and Operators